随着中国人口红利的消失,机器人在制造业和工业领域被大批量应用,其中最热的方向是机器换人和自动化升级改造。因此,移动机器人作为服务机器人的一种广泛应用,相比于传统的工业机器人,具有更强的适应性,能够代替人从事很多日常的工作。即时定位与地图构建(simultaneous localization and mapping,SLAM)为服务型机器人在运动、操作以及人机交互中提供基本条件。三维地图可以提高机器人的机动性和环境感知能力。多楼层三维地图为酒店,宾馆等企业的服务机器人导航提供便利。
提出了一种基于传感器融合的多楼层三维地图构建方法,该方法利用激光雷达和二维地图蒙特卡罗定位,来提高机器人构建三维地图中的定位精度,同时利用Kinect传感器和气压传感器构造出多楼层三维地图。图一显示的是多楼层三维地图构建过程流程图,图二显示的是实验结果。
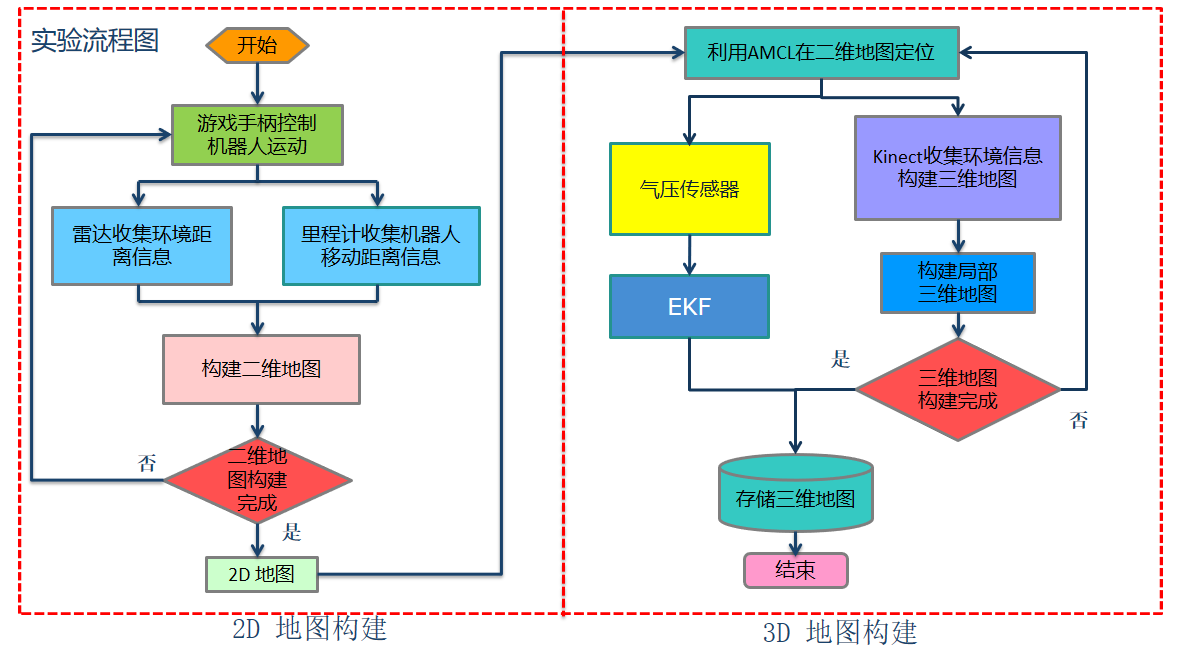
图一 多楼层三维地图构建过程
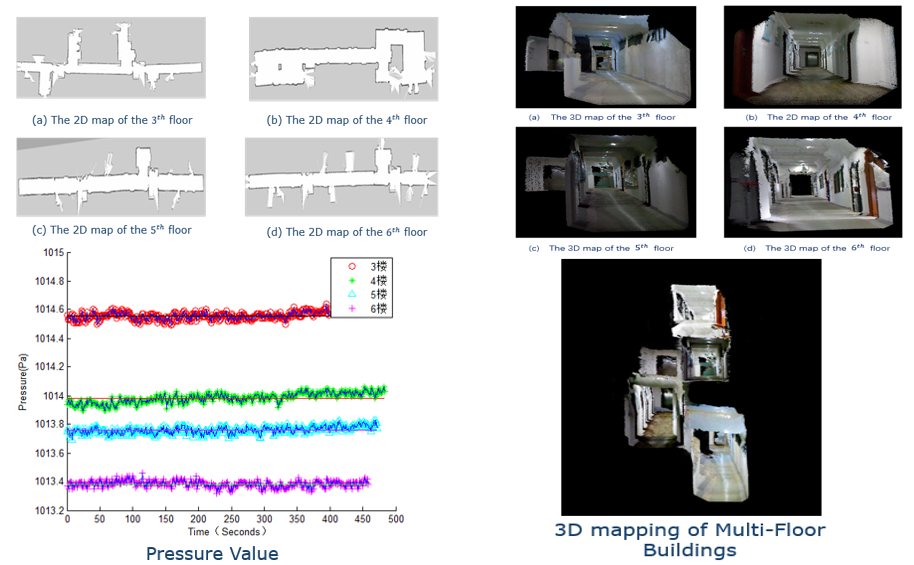
图二 多楼层三维地图实验结果
该项目已经申请专利: 范衠; 李冲;朱贵杰;李中兴;姚利;王宇鹏。一种构建多楼层三维地图的方法。 [P]. 中国专利,专利号: 201710749926.4
论文下载:Fan, Zhun and Li, Chong and Wang, Yupeng and Zhao, Lei and Yao, Li and Zhu, Guijie and Li, Zhongxing and Xie, Honghui and Xiao, Yang,3D Mapping of Multi-floor Buildings Based on Sensor Fusion ,International Conference on Industrial Informatics - Computing Technology, Intelligent Technology, Industrial Information Integration; [PDF Download],[Bibtex Download] |




