在中国,随着人口红利的减少,人工成本的增加,许多工厂和企业开始部署机器换人和自动化升级改造项目,因此机器人在制造业和工业领域被大批量应用。相比于工业机器人,服务型移动机器人具有更广泛的应用前景和更强的适应性,能够代替人类从事很多日常工作,如送餐机器人,医疗机器人等。即时定位和地图构建(Simultaneous Localization and Mapping,SLAM)为服务型机器人在日常工作和人机交互的提供最基本的条件。2D和3D地图可以提高机器人的机动性和环境感知能力。
针对上述描述,我们提出了一种基于自主移动机器人构建2D和3D地图的方法。首先,我们实验室自主开发了一套基于全向轮的自主移动机器人,如图(1)所示;其次,利用机器人操作系统(Robot Operating System,ROS)和Rao-Blackwellized particle filters (RBPF) 算法构建2D 地图,如图(2)所示;然后利用蒙特卡罗为机器人和kinect相机提供位姿,构建3D点云地图,如图(3)所示,最后,将3D点云地图转换成 OctoMap,如图(4)所示,为机器人在3D环境下导航提供了基础条件。
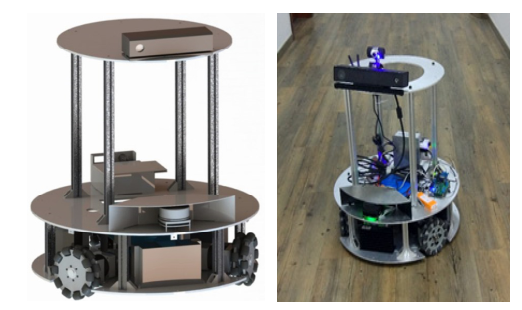
图 1 移动机器人

图 2 2D地图

图3 3D地图
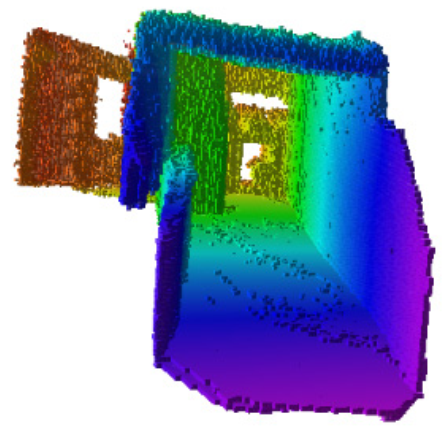
图4 3D OctoMap
论文:
Sibo Huang, Chong Li, Zhaoquan Cai, Guijie Zhu, Li Yao, and Zhun Fan*, (2019,July). Synchronized 2D SLAM and 3D Mapping Based on Three Wheels Omni-directional Mobile Robot. CYBER 2019. (Accepted)【Download PDF】
|




