近年来,针对智能机器人群体聚合与控制方面的研究一直是智能机器人领域的热点问题。在这些研究中,以基因调控网络为代表的绝大多数研究仅考虑二维场景,用以简化聚合与控制模型。随着实用化场景的需求以及无人机集群的普及,群体机器人被越来越多的应用于三维环境下的复杂任务,而使用传统的基因调控网络模型(Gene Regulatory Network,GRN)会导致机器人群体聚合形态在三维空间中不具备泛化性。为此,本实验室提出了一种基于三维基因调控网络的智能机器人群体聚合与控制方法,并针对集群围捕任务测试了该方法在三维空间复杂场景下的表现。
如图(1)所示,该方法主要分为两个部分:1) 基于全局信息自适应生成三维聚合形态的上层,以及2) 控制群体机器人形成该群体三维聚合形态的下层。图中,Ti和Qi分别代表环境中目标和障碍物产生的蛋白质浓度,M表示形态梯度空间,用于生成群体聚合形态并将其传递到下层网络。下层中,Pi和Gi分别表示第i个机器人当前的位置和内部状态,其中Gi会随着相邻机器人的位置信息而发生改变。随着Ti、Qi、Gi的扩散和改变,围捕机器人之间能够保证对目标与障碍物的信息共享。为验证模型的有效性和可行性,我们分别利用MATLAB和V-rep物理仿真平台对群体机器人动态围捕过程进行仿真实验,其中场景中设有楼房、树林以及山丘等障碍物,如图(2)和图(3)所示。此外,我们还通过计算群体机器人在相同时间步长下,围捕机器人与目标的平均距离Da、围捕机器人收敛误差Øs和围捕机器人包围球面的包围强度Ds的变化情况,得到了群体机器人综合评价指标,如图(4)所示。
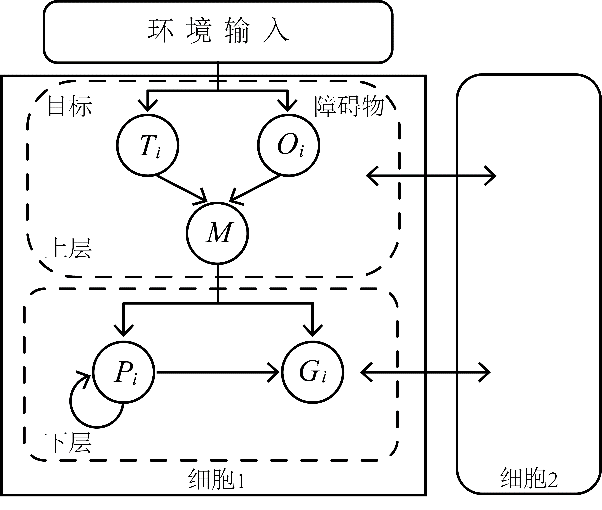
图1 群体聚合形态自动生成方法示意图
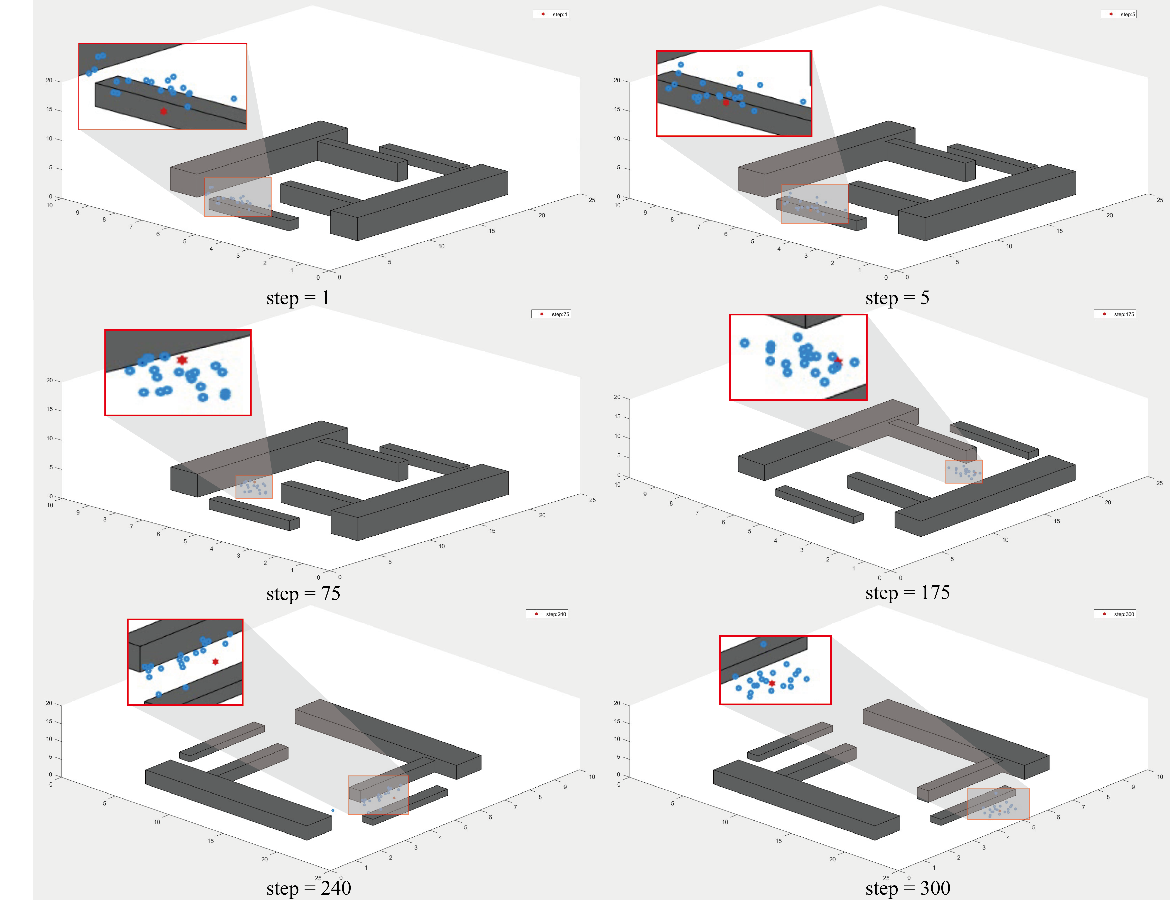
图2 群体机器人动态围捕过程
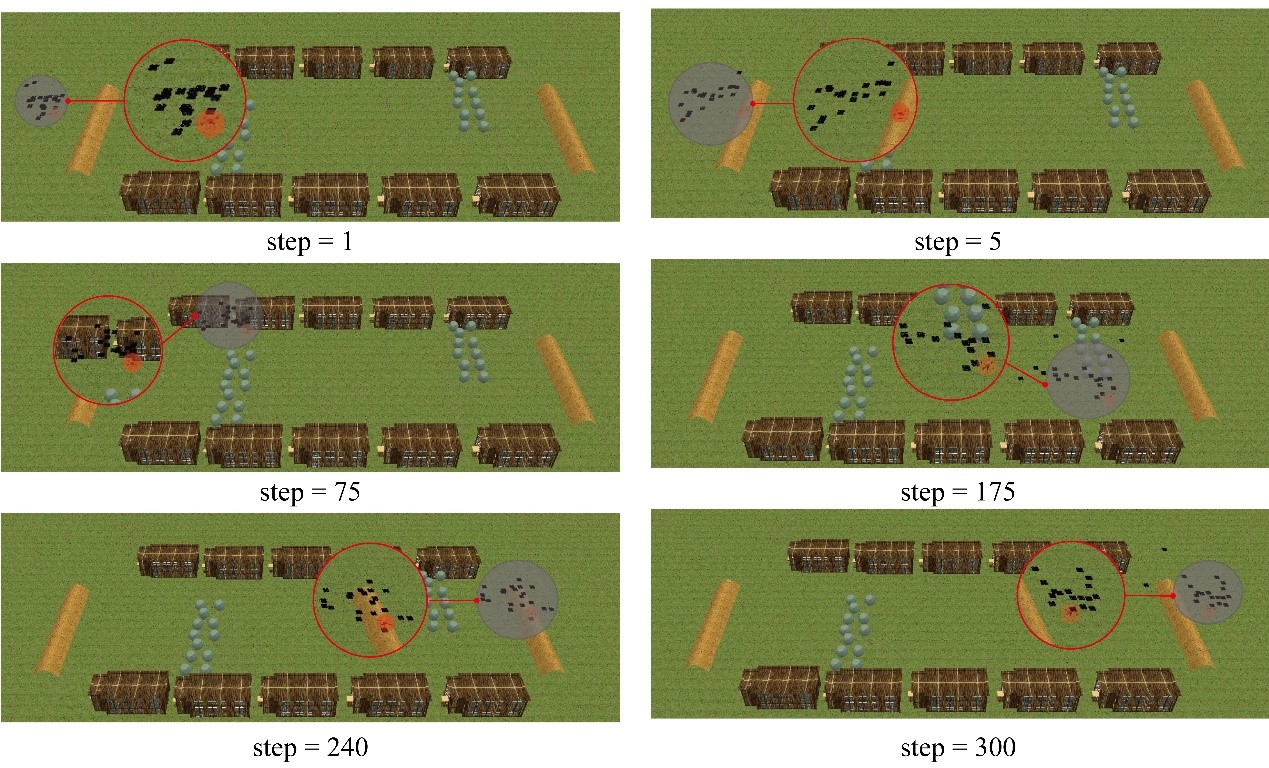
图3 V-rep平台下的仿真实验结果

图4 机器人综合评价指标
目前研究成果已被第十八届中国机器学习会议(CCML 2021)录用,并发表于南京师范大学学报(工程技术版)。
[视频1] [视频2]
|




