近年来,分布式光纤传感技术已得到逐步改进,达到了很出色的定位精度和灵敏度。相位敏感光时域反射仪(Φ-OTDR)是一种典型的分布式传感系统,已应用于许多领域,例如长距离油气管道监控,电力电缆监控,电子围栏,结构健康监控等。但是事件的分类一直是一个问题,尤其是对各种类似事件进行分类,这成为其应用的瓶颈。分布式光纤传感系统中采集到的信号可以反映不同振动源的特性,因此可以通过合理的方法对不同事件进行分类。
我们从图像的角度考虑,将系统采集到的信号转换为图像,进而进行分类。在现有的国内外相关研究中,很少有超过五类事件的分类研究,我们在研究实验中,对八类事件进行了分类。考虑到时空域中的振动信号信息,首先通过带通滤波器对直流分量进行滤波,然后通过CNN提取特征,最后通过SVM对特征进行分类。具体的实验过程如下:
1. 分布式传感系统结构介绍
我们设计的Φ-OTDR分布式传感系统如图1所示,光源是频率宽度为3kHz的超窄线宽激光器(NLL),它具有非常小的频率漂移和高相干性。激光发出的光是连续光,它是通过声光调制器(AOM)将连续光分割成脉冲光。传输过程中存在一定的光损耗,因此采用掺饵光纤放大器(EDFA)对光进行放大,EDFA具有增益高,噪声低,工作频带宽,输出功率高,泵浦效率高等优点。放大的探测脉冲通过循环器注入传感光纤。传感光纤采用的是G652单模光纤,长度大约1公里,埋在地下5厘米处。在传感光纤上方实施了不同的事件。瑞利后向散射(RBS)光波直接路由到光电探测器(PD)。强度随时间的变化由数据采集卡(DAC)以50MHz的采样频率记录下来,并在个人计算机(PC)中进行处理。
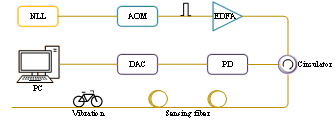
图1. 分布式光纤传感系统
2. 数据预处理
CNN用于从图像的角度提取不同事件的特征,因此数据应采用矩阵形式。将每条瑞利反向散射轨迹作为一行形成数据矩阵。每个矩阵的水平方向表示空间域,垂直方向表示时域。时域的数据长度取决于传感光纤的长度。由于探测脉冲的频率为20kHz,因此在时域中每秒有20,000个数据点。传感光纤不同位置的散射点的光强度不同,在时域中产生的直流分量的强度也不同。为了在时域中对直流分量进行滤波,本实验中使用了带通滤波器。通带设置为5Hz至15kHz。对于带通滤波器之后的数据,在空间域中选取振动区域附近50米,在时域中选择1秒作为处理后的数据矩阵。通过带通滤波器之后,从图像的角度来看,每类事件的处理后的数据矩阵看起来仍然非常相似。从每种事件类型中选择的已处理数据矩阵如图2所示。每个图片仅代表相应事件的数据之一。
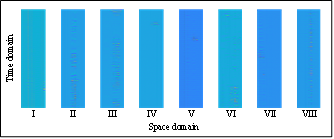
图2. 从每种事件类型中选择的已处理数据矩阵。
事件I为在相对安静的环境中,不施加人为干扰,仅收集环境噪声;事件II为一个人以每秒约1.2米的速度在传感光纤附近行走,在行走过程中,没有发生其他明显的振动;事件III为一个人从大约25厘米的高度,以大约一秒钟一次的速度在传感器光纤附近跳跃,在跳跃过程中,没有其他明显的振动发生;事件IV为一个人用铁锹以大约一秒钟一下的速度在传感器光纤附近敲击地面,在敲击期间没有发生其他明显的振动;事件V与事件IV类似,区别是将敲击的动作换为挖掘;事件VI为两个人按固定的时间间隔,骑自行车依次穿过传感器光纤,行驶速度约为每秒3米,在行驶过程中,没有发生其他明显的振动;事件VII与事件I类似,不同之处在于事件I是晴天期间收集的数据,而此类事件是在雨天期间收集的数据,雨的大小是变化的,包括小雨和大雨,不同大小的雨被视为同一事件;事件VIII为一个人拿起水管用水流冲洗传感器光纤附近的地面,水到达最高点处离地面约一米,在冲洗过程中,没有发生其他明显的振动。
数据特征的相似性增加了分类的难度,CNN是出色的特征提取器,很显然计算越少,运行速度就越快。每个事件的已处理数据矩阵仅表示不同空间位置随时间的强度演变,因此将处理后的数据矩阵转换为灰度图像是最合理的方法。CNN用于灰度图像的计算速度要快于RGB图像,并且灰度图像已经能够表示强度随时间的变化。将CNN输入的灰度图像尺寸调整为299×299。每种事件类型的灰度图像之一如图3所示。

图3. 每种事件类型的灰度图像之一
3. 特征提取
CNN是类似于多层全连接神经网络(FCN)的一种前馈神经网络。FCN的缺点是当前层中的每个神经元都需要与上一层中的神经元连接,因此参数数量非常大。对于图像识别任务,每个像素与周围像素紧密相关,而与较远像素的相关性很小,如果一个神经元连接到上一层中的所有神经元,则图像中的所有像素均被视为相等,CNN当前层中的每个神经元不再连接到上一层中的所有神经元,而仅连接到少数神经元,因此减少了许多参数。通过卷积和池化操作,有效地提取了特征,逐渐减小了神经元的大小,并大大减少了计算量。我们提出的CNN模型如图4所示。
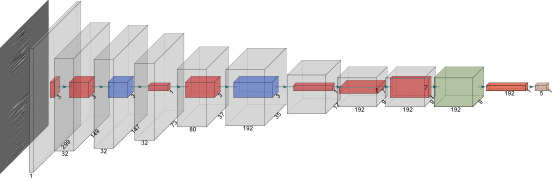
图4. 实验中所用的CNN模型
4. 特征分类
CNN的优点是可以很好地提取特征,但是softmax并不是最理想的分类方法。在机器学习领域,有许多传统分类器更适合执行分类任务,比如SVM,NB,RF,ET等,我们的实验结果表明,SVM在此项研究中,是最适合的分类器。SVM通过使用核函数将数据从样本空间映射到高维特征空间来解决非线性问题。实验中有很多核函数,例如线性核函数,多项式核函数和径向基函数,在本实验中,使用线性核函数获得了最佳结果。CNN完成训练后,将用于训练CNN的数据再次输入到训练后的CNN模型中,并在最后的池化层中将特征提取出来作为SVM的输入。从CNN模型中提取特征进行SVM训练的结构图如图5所示,训练后的SVM模型被用作最终分类器。
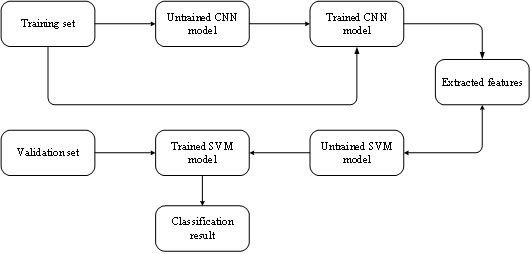
图5. 从CNN模型中提取特征进行SVM训练的结构图
5. 实验结果
五个分类器的分类结果如于表1所示,SVM的总体准确性最高,每个事件的Recall都超过90%。SVM和RF分类器的总体准确度相似,但是SVM的训练时间比RF短。与单独的CNN相比,SVM的整体精确度提高了2%,事件IV和事件VII中SVM的精度比仅使用CNN的精度高了很多。NB具有最短的训练时间,但其准确性不如其他分类器。SVM分类结果的混淆矩阵如图6所示。
表1. 五个分类器的分类结果
|
Classifier
|
Event types
|
Precision
|
Recall
|
F1-score
|
|
Softmax
Accuracy=92.13%
|
I
|
1.0000
|
1.0000
|
1.0000
|
|
II
|
0.9228
|
0.9047
|
0.9137
|
|
III
|
0.9485
|
0.9286
|
0.9384
|
|
IV
|
0.8942
|
0.9238
|
0.9088
|
|
V
|
0.9600
|
0.9152
|
0.9371
|
|
VI
|
0.8560
|
0.8692
|
0.8625
|
|
VII
|
0.8425
|
0.9013
|
0.8709
|
|
VIII
|
0.9433
|
0.9382
|
0.9407
|
|
SVM
Accuracy=94.17%
Time=2.99s
|
I
|
0.9910
|
0.9970
|
0.9940
|
|
II
|
0.9407
|
0.9109
|
0.9255
|
|
III
|
0.9304
|
0.9671
|
0.9484
|
|
IV
|
0.9233
|
0.9146
|
0.9189
|
|
V
|
0.9472
|
0.9607
|
0.9539
|
|
VI
|
0.8353
|
0.9509
|
0.8894
|
|
VII
|
0.9972
|
0.9066
|
0.9497
|
|
VIII
|
0.9323
|
0.9394
|
0.9358
|
|
Gaussian NB
Accuracy=91.77%
Time=0.33s
|
I
|
1.0000
|
0.9970
|
0.9985
|
|
II
|
0.9431
|
0.9052
|
0.9238
|
|
III
|
0.8997
|
0.9737
|
0.9352
|
|
IV
|
0.9220
|
0.8608
|
0.8903
|
|
V
|
0.9422
|
0.9321
|
0.9372
|
|
VI
|
0.7011
|
0.8795
|
0.7802
|
|
VII
|
1.0000
|
0.8586
|
0.9239
|
|
VIII
|
0.8828
|
0.9697
|
0.9242
|
|
RF
Accuracy=93.83%
Time=6.01s
|
I
|
1.0000
|
1.0000
|
1.0000
|
|
II
|
0.9518
|
0.9080
|
0.9294
|
|
III
|
0.9338
|
0.9737
|
0.9533
|
|
IV
|
0.9117
|
0.9146
|
0.9131
|
|
V
|
0.9504
|
0.9571
|
0.9537
|
|
VI
|
0.8000
|
0.9107
|
0.8518
|
|
VII
|
1.0000
|
0.8990
|
0.9468
|
|
VIII
|
0.9007
|
0.9621
|
0.9304
|
|
ET
Accuracy=93.22
Time=1.35s
|
I
|
0.9970
|
1.0000
|
0.9985
|
|
II
|
0.9520
|
0.9109
|
0.9310
|
|
III
|
0.9200
|
0.9836
|
0.9507
|
|
IV
|
0.9143
|
0.9114
|
0.9128
|
|
V
|
0.9472
|
0.9607
|
0.9539
|
|
VI
|
0.8219
|
0.9062
|
0.8620
|
|
VII
|
1.0000
|
0.8914
|
0.9426
|
|
VIII
|
0.8944
|
0.9621
|
0.9270
|
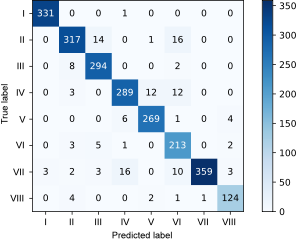
图6. SVM分类结果的混淆矩阵图
我们用T-SNE方法分别对输入CNN和SVM之前的数据进行降维。进入CNN之前的数据是原始数据,而进入SVM之前的数据是已被CNN提取特征以后的。降维后的验证集数据特征如图7所示。从结果可以看出,在数据通过CNN模型之前,不同类别的数据是混合在一起的。而通过CNN之后,同一类别的数据被聚在一起,而不同类别的数据则基本上被分离了。少量不同类型的数据依然混合在一起,考虑这些样本在采集时可能已经混合了不同类型的振动。图7的结果表明,我们提出的CNN模型具有良好的特征提取能力。
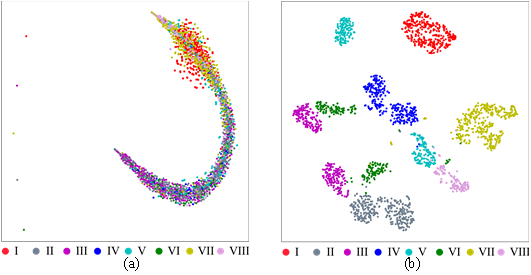
图7. 降维后的数据特征:(a)进入CNN之前的数据特征;(b)进入SVM之前的数据特征
我们用Grad-CAM方法可视化了CNN模型的分类依据。图8显示了通过Grad-CAM方法获得的针对不同类型事件的区域图和热图。带有黑色边缘的区域图画出了CNN模型进行预测的重要区域。热图上的区域越红,对应的区域对于分类就越重要。从图8可以看出,不同类型的事件具有不同的重要区域。I型和VII型都是自然环境造成的,因此它们的振动非常弱。V型是由铁锹引起的,铁锹锋利且与地面接触面积很小,因此该事件也会产生微弱的振动。因此,CNN的这些关注领域比其他类型的要大。III型振动强烈而短暂,因此CNN的关注区域精确地锁定在振动的位置和时间段。IV型振动的持续时间也很短,但强度不够,因此CNN的关注区域包括振动期间和之后的信息。II型,VI型和VIII型的振动都具有较长的周期,因此CNN的这些焦点区域在时域上都非常长。
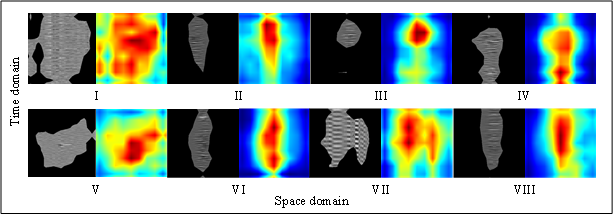
图8. 针对不同类型的事件获得的热图
我们的实验结果证实了,通过CNN提取特征,并用SVM对提取的特征进行分类的方法是有效的。以上实验研究,可以有效解决分布式光纤传感系统在事件分类上的问题,使得该系统能够更广泛的应用在不同的领域。
参考文献:
[1]. Shi Yi*; Wang Yuanye; Zhao Lei; Fan, Zhun . An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning[J]. Sensors, 2019, 19, 3421.
[2]. Yi Shi*, Yuanye Wang, Lei Zhao, and Zhun Fan,Multi-event Classification for Φ-OTDR Distributed Optic-Fiber Sensing System Using Deep Learning and Support Vector Machine. (在投)
|




