机器人协作,例如协作运输,搜索和救援,协作式SLAM,可以集成不同机器人的功能来完成复杂的任务或提高效率。而机器人技术协作的基础是确保不同的机器人可以相互通信,以便他们可以共享信息并分配任务。
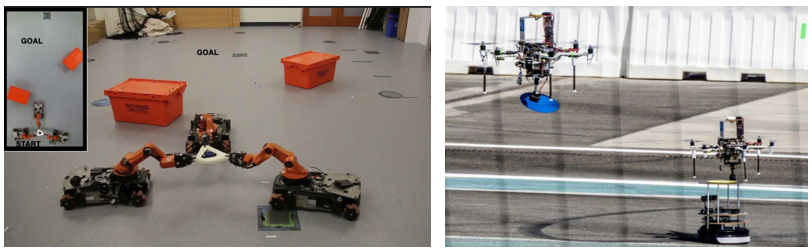
图1. 机器人经典协作任务
2010年,James Kuffner提出了“云机器人”一词,并描述了云机器人技术的许多潜在好处。在后续研究中,像Roboearth,Rapyuta和micROS这样的云机器人项目被提了出来,解决了标准机器人计算能力不足和智能程度低的问题。但同时,云机器人技术有其缺点:
1.高网络延迟 2.有限的带宽 3.与异构机器人进行交互时面临挑战
在本研究中,我们设计了两款机器人,分别是用于移动运输的服务机器人StellaX和一个用于抓取物体的六自由度机械臂,他们通过一个边缘计算机和云服务器构成一个异构机器人协作网络。两台机器人分别具有自主室内导航和识别抓取物体的功能,其中:
Ÿ 室内导航
我们使用车轮里程表和二维激光数据作为输入,并使用粒子滤波算法进行定位并创建二维占用栅格图。
Ÿ 物体检测和抓取
我们的方法基于Faster R-CNN和SSD模型。 将Kinect提供的RGB图像输入到模型中,可以获得目标对象的边界框,这意味着可以计算目标的二维坐标。 通过对深度图像进行深度提取,可以获得相机坐标系中的坐标。此坐标将用于机械臂定位物体并抓取。
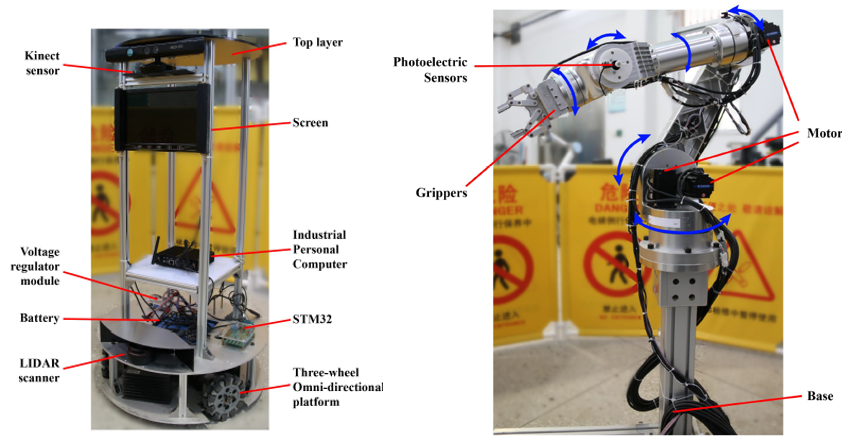
图2. 移动服务机器人StellaX和六自由度机械臂
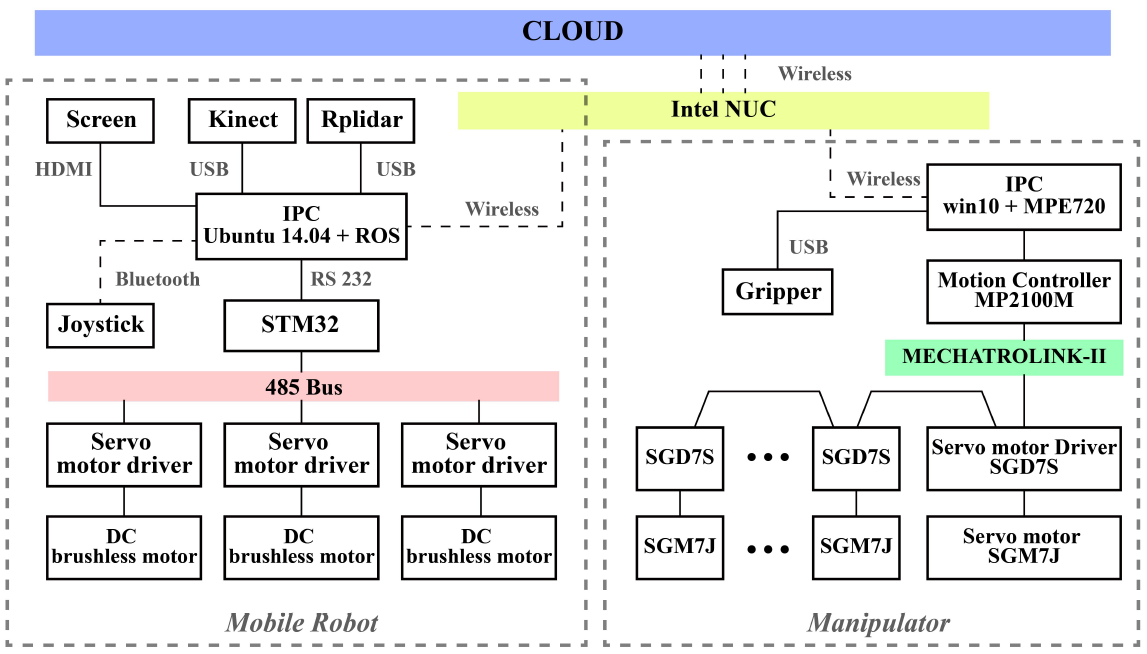
图3. 协作机器人系统整体框架
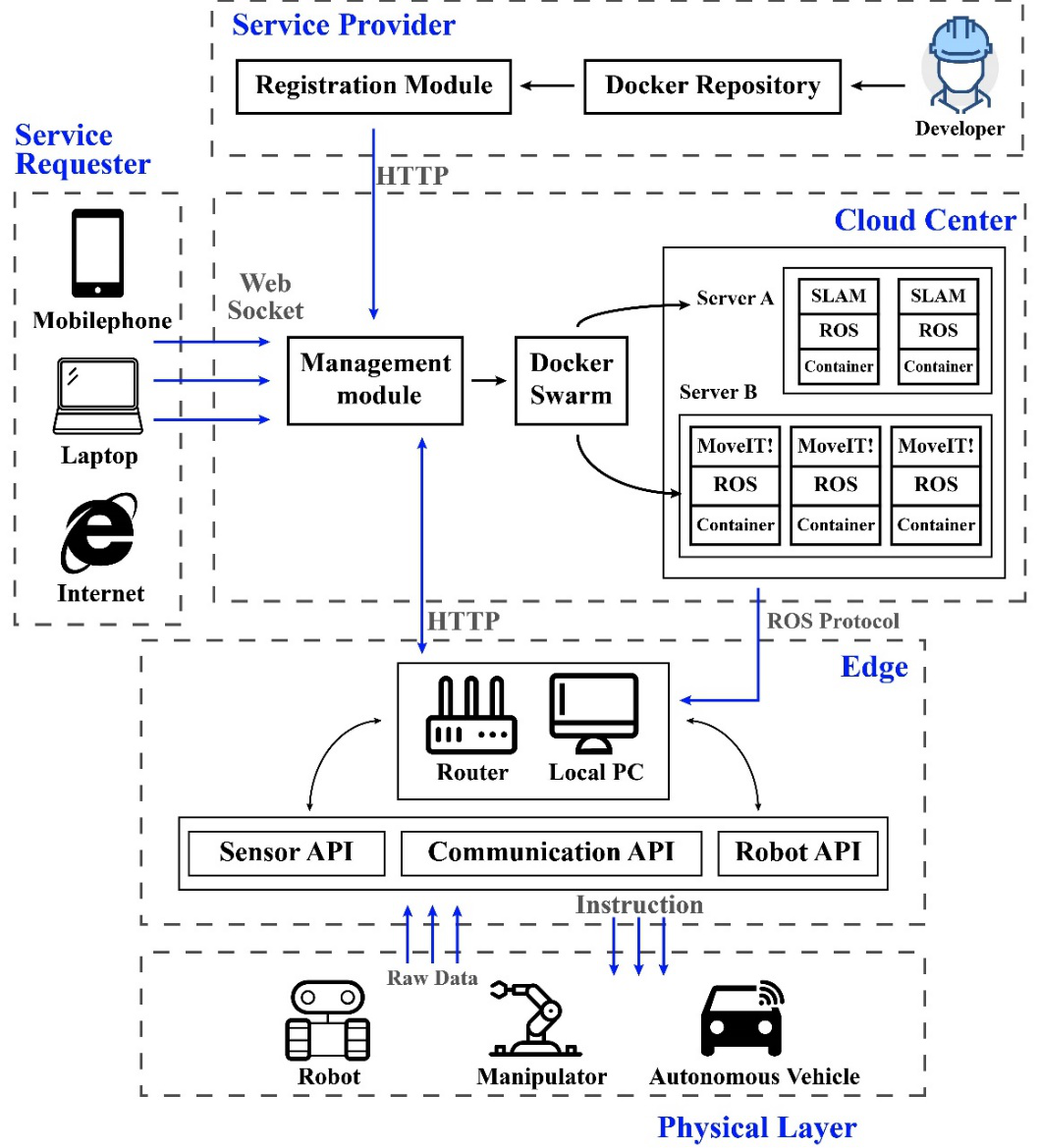
图4. 基于边缘计算的Docker Edge Robotics Framework
我们通过这么一个实验验证了该系统的性能:StellaX观察待抓取物体的位置,并通过边缘计算机Intel NUC与机械臂共享信息。机械手执行抓取任务并将对象放置在StellaX的顶部后,之后将执行自主导航应用程序,运输到特定地点。
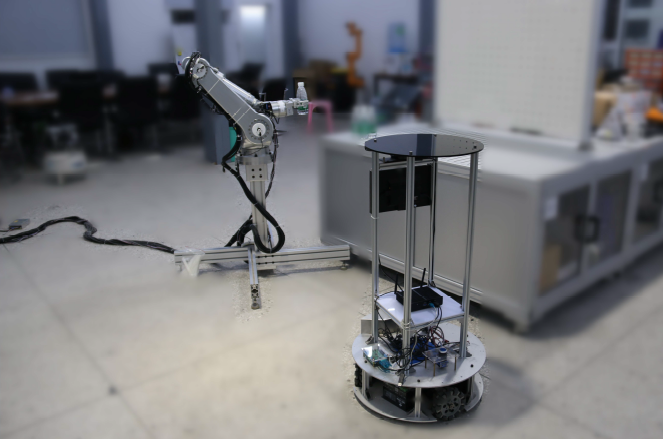
图5. 实验场景图
实验结果如下:
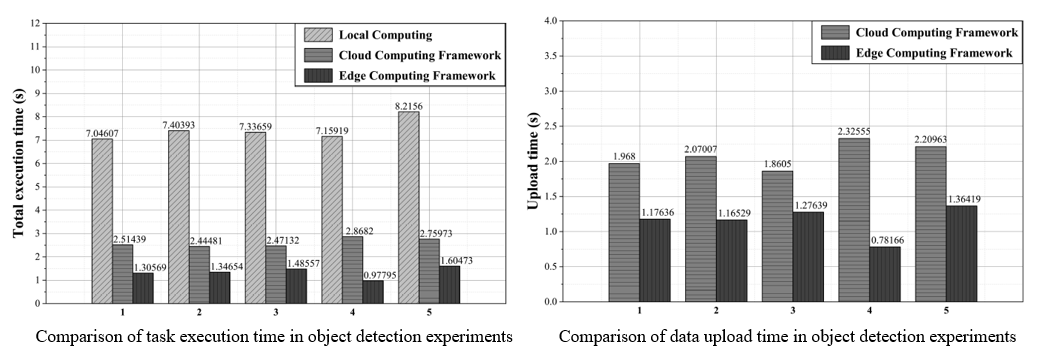
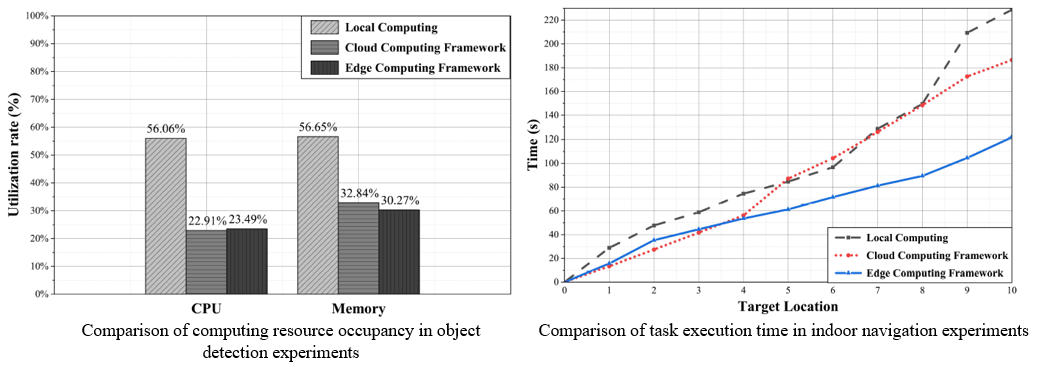
图6. 实验结果分析图
综上所述,本研究主要的贡献点有:
设计并实现一个协作系统,该系统由两个异构机器人,移动机器人StellaX和一个六自由度(DoF)机械手组成。
提出了一种基于边缘计算的系统,名为Docker Edge Robotics Framework(DERF),用于异构机器人之间的通信和任务分配。
实验结果证明,在物体识别,室内自主导航等任务中,基于边缘计算的框架比基于云计算的框架具有更低的延迟和更快的响应。
论文下载:Download PDF
|




