智能移动服务机器人StellaX是一款由汕头大学人工智能与机器人实验室的NEO机器人团队自主研发的服务机器人,其拥有自主导航、移动避障、语音识别、跟踪目标功能。可配置在如养老院、家庭、仓库等环境进行移动辅助任务。
StellaX目前已研发至3.0版本,其外部结构从有机玻璃升级为钢板及铝板,增强了机器人整体结构的紧凑性及强度。控制核心由外部电脑升级为工控机,提高了机器人的数据处理速度及运算效率。StellaX3.0还增加了语音识别功能,大大降低了使用的复杂性,用户只需对着机器人说出命令,机器人便可严格地开始执行。

StellaX 1.0 StellaX 2.0 StellaX 3.0
图一 三代StellaX机器人
StellaX 3.0 顶部设有可更换型储物箱,在如社区养老院、会所、仓库等地方,StellaX可进行物资的运送工作,使用者在初始点往储物箱内放下运送物资后向机器人下达运送指令,顶部储物箱自动上锁,机器人开始运动至目标点。安全到达目标点后,舱锁打开,供目标人员取出物资。
在StellaX机器人的外部配有平板电脑,在默认状态下,平板电脑显示机器人的表情状态,随着下达指令的不同,机器人的表情会做出相应的变化。在运送物资的过程中,也会通过屏幕文字来显示此时的运动状态,如“我正在运送物资”“我已到达目标点”。通过表情的变化即文字的提示,增强了机器人与使用者之间的交互性。
StellaX机器人主要核心传感器为激光雷达,机器人在首次运动时通过激光数据生成环境地图,保存位置信息。在后续运动中用户则可只需说出地点位置,机器人则可自动生成此时位置至目标点之间的最优路径。在运动过程中,激光雷达实时监测前方环境信息,当遇到障碍物时,机器人可实时更新路径实现避障功能。
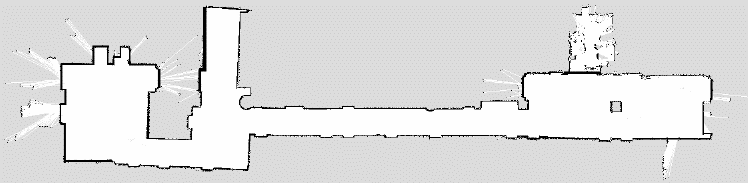
图二 环境地图信息
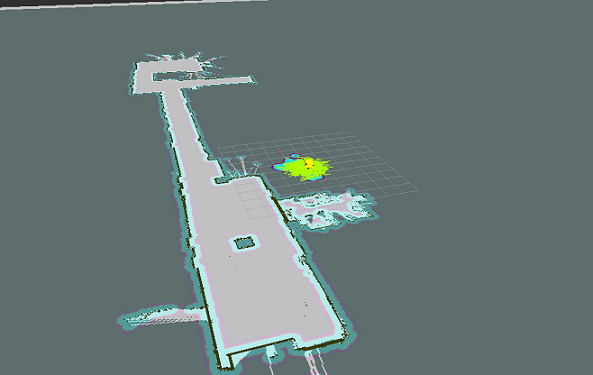
图三 环境地图信息
现在项目已经取得实用新型专利一项《一种自主移动机器人平台控制装置》(专利号:ZL201621094143.4)。同时平台在2017年中国服务机器人大赛中获得Follow项目亚军,Who Is Who项目季军。
另外,StellaX作为一款移动服务机器人,其自主导航避障功能可能会应用于多种场景。在后续版本中,团队将会考虑云计算和机器学习算法的融入,加强机器人的数据处理能力,提高机器人的智能水平。
养老护理机器人StellaX演示视频点击[视频1]
跟随演示视频点击[视频2]
导航避障演示视频点击[视频3]
stellax通用服务机器人演示视频点击[视频4]
|




