采用成熟的单项技术,服务机器人已经能够在比较小范围的非结构化环境下进行工作。但是当工作环境扩大时,该技术的稳定性将大大下降,无法满足服务机器人商业应用的可靠性要求。因此,项目组提出了采用分而治之的模块化集成方法,使服务机器人可以在不影响系统可靠性的前提下,根据用户的需求方便可靠地增加或减少工作环境。
由于该方案没有采用昂贵的传感器和技术,因而极具大规模商业应用的潜力。现已开发出原型机3台,在现场测试中获得了良好的效果,并且现正在进行专利申请。该项目还获得了丹麦Alectia Fond Award阿莱克提亚基金奖,以表彰其在医疗健康领域所作出的贡献。考虑到人口老龄化将是中国在未来10到20年内不可避免会遇到的难题,开发可靠实用的商业服务机器人将成为解决该问题的必然选择。该项目将为解决我国的人口老龄化难题做出应有的贡献。
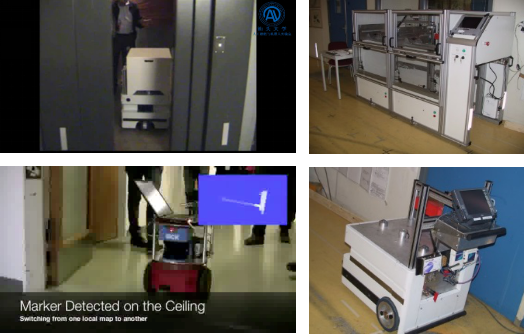
图一 项目组开发的医用交通机器人系统
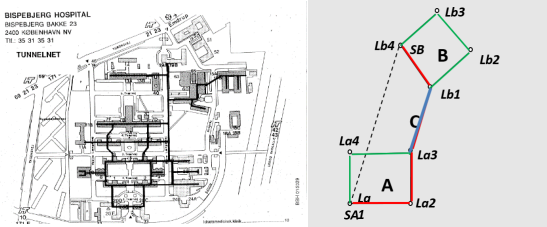
图二 分而治之的模块集成方法
目前成果:已经发表在《International Conference on Intelligent Robots and Systems ( IROS )》
论文下载:Ozkil, A. G and Fan, Zhun and Xiao, Jizhong and Kristensen, J. K;Empirical evaluation of a practical indoor mobile robot navigation method using hybrid maps;Ieee/rsj International Conference on Intelligent Robots and Systems; [PDF Download],[Bibtex Download]
演示视频:[演示视频] |




