由于具有可重复性、可靠性、效率性以及敏捷性,机械臂已经广泛运用于实际生产活动,如产品制造、抓取物件以及装配流水线等。路径规划是机械臂实现其自身功能很重要的一部分,因为路径规划提供输入信号给控制器以控制机械臂运动。然而,多自由度机械臂由于其冗余性,能提供多条从起始位置到终点位置的路径,如何选择一条路径指标相对较优的路径也是机械臂路规研究的一个重要方向。与原有方法中使用一组关节状态表示机械臂空间位姿,项目组对路径点的编码方式进行修改,采用前后时刻的关节状态变化量对机械臂空间位姿进行表示,并使用多目标进化方法对机械臂路径进行优化,加快了问题收敛。使机械臂在运动空间内沿着一条能耗较少,执行时间较少的路径进行运动。
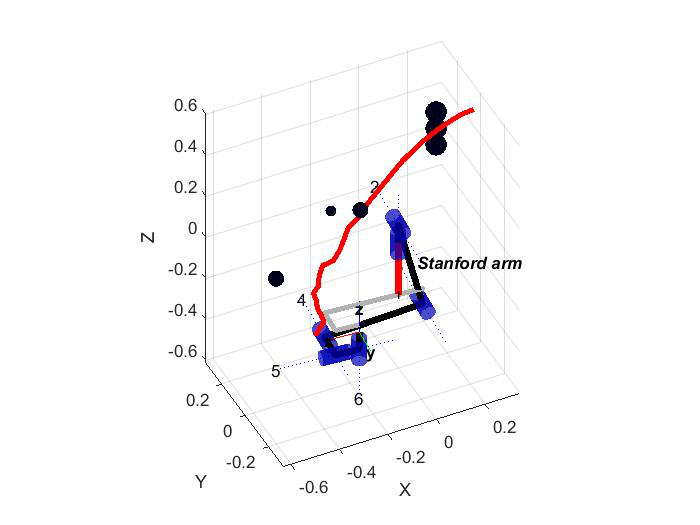
图一 项目组采用多目标优化算法得到的路径
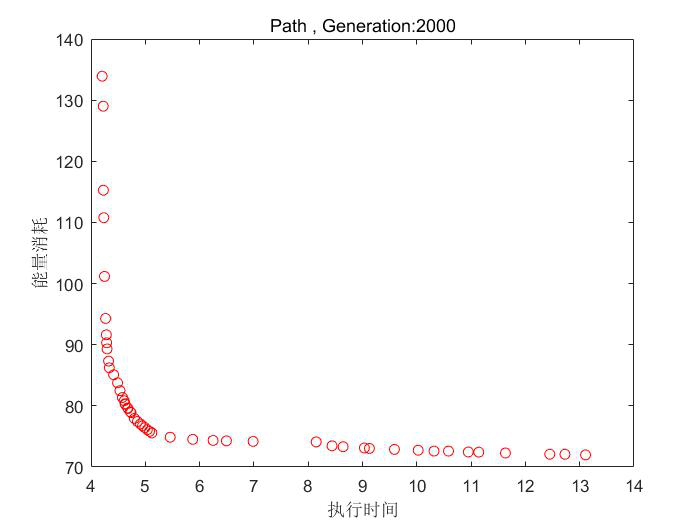
图二 改进后的优化结果
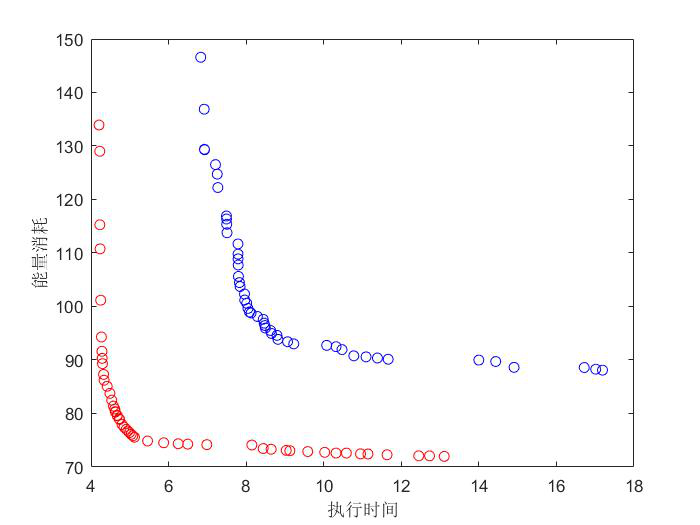
图三 优化结果对比(红色代表改进的方法,蓝色代表原先的方法) |




