2021年8月25日,汕头大学、华南理工大学和华南农业大学联合研制的“面向设计自动化的智能机器人系统关键技术及应用”项目成果鉴定会议在汕头大学以线上线下混合的方式召开。
本次鉴定会议由湖南大学王耀南院士(机器人视觉感知与控制技术国家工程实验室主任、全国五一劳动奖章、全国先进工作者)、中山大学赖剑煌教授(广东省信息安全重点实验室主任、视频图像智能分析与应用公安部重点实验室副主任)、深圳大学蔡茂国教授(院党委书记)、中国科学院自动化研究所侯增广研究员(国家杰出青年基金获得者、万人计划入选者)、华中科技大学黄心汉教授(国务院政府特殊津贴专家,湖北省有突出贡献的中青年专家)、南开大学韩建达教授(国务院政府特殊津贴专家)、广东工业大学刘海林教授(应用数学学院院长、广州工业与应用数学学会副理事长)、中山大学倪江群教授(中国图象图形学会理事)、北京大学彭宇新教授(国家杰出青年科学基金获得者)、合肥工业大学汪萌教授(国家杰出青年科学基金获得者)、同济大学徐立鸿教授(中共中央国务院中央军委颁发“共和国成立70周年纪念章”获得者)、国防科技大学朱晓敏教授(湖南省杰出青年基金获得者、IEEE SMC青年科学家奖获得者)和广东工业大学战荫伟教授(广东省优秀青年教师奖“南粤教坛新秀”获得者)等行业资深专家组成,对“面向设计自动化的智能机器人系统关键技术及应用”项目的带压堵漏机器人系统、集控室监盘机器人系统、路桥检测复合型机器人系统、农业用复合型智能机器人、六足蛇形机器人系统、智能移动机器人平台设计、教育类编程机器人设计开发、图像去雾和去雨算法、视频目标跟踪与分割算法、计算机辅助钢筋端面自动识别系统和计算机辅助眼病诊断系统等一系列科技成果进行鉴定。以朱晓敏教授为组长、汕头职业技术学院谢志刚副教授(数字化技术研究与应用中心副主任)和汕头市超声仪器研究所股份有限公司杨金耀教授级高级工程师(国务院特殊津贴获得者)为组员的测试组宣读了测试意见。以彭宇新教授为组长、中国科学院大学吕科教授和浙江大学赵洲教授(2018年获得福布斯中国科学领域30U30封面人物)为组员的资料审查组宣读资料审查报告。

图1. 鉴定会专家组成员和汇报组成员

图2. 汕头大学的郝志峰校长线上致欢迎词

图3. 范衠教授对项目成果详细汇报
鉴定会上,汕头大学的郝志峰校长致欢迎词。由汕头大学、广东省数字信号与图像处理技术重点实验室的范衠教授对项目成果进行了详细汇报,重点介绍了项目成果的新技术方法体系、创新点、科技成果转化应用情况及成果所带来的社会和经济效益,并对项目的实验进行了演示。鉴定委员会专家们认真听取了研制报告与技术报告,仔细审查了鉴定材料,观看了有关实验及操作演示,并严谨质询了成果内容。鉴定委员会对项目成果给予了充分肯定,并提出了宝贵的指导意见。
经过鉴定,鉴定委员会认为,在智能机器人系统优化方面,该项目深入研究了多目标进化算法优化智能机器人系统,提出了基于外部种群引导的多目标进化算法EAG-MOEA/D、基于分解排序和角度选择的多目标进化算法MOEA/D-SAS、基于Push和Pull搜索的约束多目标算法PPS-MOEA/D等,为智能机器人系统优化提供有效的算法和技术支撑。在智能机器人系统自动化软件平台方面,该项目围绕智能机器人系统设计的自动化,建立了方程式、键合图、几何的多角度融合模型,可以并行设计包含离散事件的被控对象和控制器的混杂机电系统,提出了机器人设计自动化的多目标优化方法,实现了从机器人本体和控制器、机器人视觉系统到群体机器人行为的自动化设计。在智能机器人的多模态视觉感知方面,该项目提出了数字图像去雨、去雾预处理,基于图像的速度场、温度变化、压力场属性测量和多目标跟踪等方法,提高了机器人系统的感知和适应能力。鉴定委员会一致认为:“该项目取得了创造性的成果,具有自主知识产权,在智能机器人系统的多目标优化算法、设计自动化和多模态视觉感知技术方面达到国际先进水平。”最后,鉴定委员会专家一致同意通过科技成果鉴定。
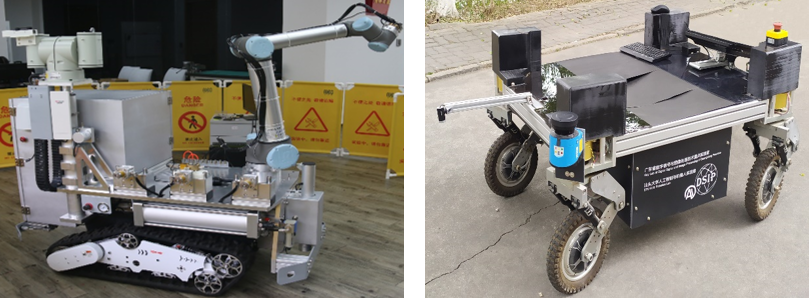
图4. 项目成果-带压堵漏机器人实物展示 图5. 项目成果-道路裂缝检测机器人实物展示

图6. 项目成果-集控室监盘机器人实物展示 图7. 项目成果-六足机器人实物展示
|




