群体机器人系统因其广泛的应用而受到越来越多研究者的关注,如协同巡逻、任务分配、目标跟踪和导航、自主搜救等。在这些研究中,群体机器人系统的包围控制以其在民用和军事领域的实用价值吸引了众多研究者的兴趣。其应用范围包括使用多个传感器的机器人集群进行侦察和监视、使用多架无人机捕获敌人目标、由一支武装机器人车辆小组保护目标。上述应用的核心问题是控制一组智能无人平台形成预期的队形,包围特定的目标,最终形成一个个包围圈。
针对上述描述,我们提出了一种基于基因调控网络的群体机器人分布式协同包围算法。该算法的灵感来源于生物学中细胞的分裂与融合,以及细胞介质浓度的概念。无论在有通信或无通信的场景中,基于基因调控网络的群体机器人都能根据传感器获取目标的位置,并生成目标包围形态,最终围成一个个包围圈。
同时,为了更好地验证算法的鲁棒性和可行性,我们分别设计了仿真实验和实机实验。仿真实验设计了一个具有汕头特色的小公园场景,其中有相对于机器人来说较为复杂的八脚亭,如图1所示。实机实验实现效果如图2和3所示,基于基因调控网络的群体机器人实现了类似细胞融合与分裂的包围效果。

图1:群体机器人在汕头小公园亭子仿真场景
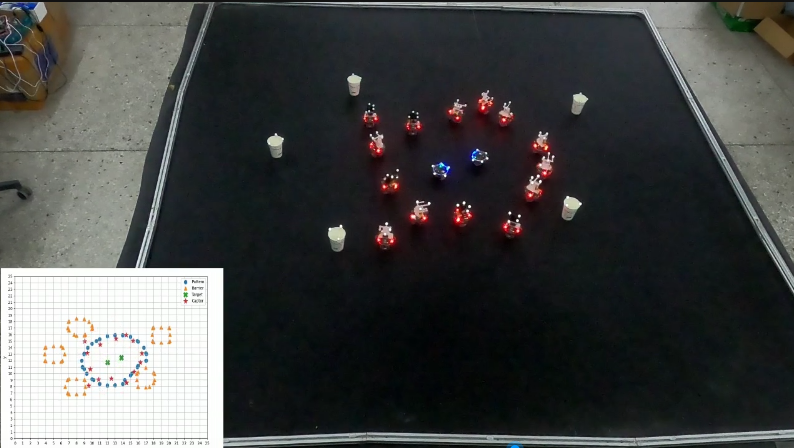
图2:群体机器人实现了类似细胞融合的包围效果

图3:群体机器人实现了类似细胞分裂的包围效果
视频链接:
[视频1]
[视频2]
[视频3]
|




