2018年10月19日,广东省数字信号与图像处理技术重点实验室本学期第三次研讨会于人工智能与机器人实验室成功召开。本次研讨会共由一名博士后和一名硕士生带来报告,分别是王宏明、游煜根。
主讲人介绍:

王宏民,1978年,2017博士后,研究方向:复合机器人。导师:范衠

游煜根,1991年,2015级硕士研究生,研究方向:机器人,优化设计。导师:范衠
学术交流例会现场
王宏明博士后报告
题目:
博士后中期考核汇报
报告的主要内容:
报告介绍了博士后课题--复合型机器人的一些初步成果,包括复合型机器人的建模,优化与控制,同时报告了后期的研究计划。
具体的工作为:
1、复合机器人移动平台的设计与控制;
2、六轴工业机械臂的设计与控制;
3、移动平台+六轴工业机械臂=复合机器人的整机联调;
4、利用复合机器人完成特定任务:裂缝检测+带压堵漏。
目前课题上需要解决的主要问题有:
1、目前六自由度工业机械臂体积较大,需要根据实际的负载需求进一步尺度优化;
2、完善控制界面功能,将运动学算法结合控制界面底层算法,提升软件部分的整体性,提高机器人的控制效率;
3、针对复合机器人运动过程中稳定性问题,完善保护功能;
4、系统控制的实时性需进一步提高,优化时延控制算法。
下图为报告的目录和主要内容


游煜根硕士报告
题目:
Analysis and Multi-objective Optimization of a Kind of Teaching Manipulator
报告的主要内容:
报告对一种六自由度的示教机械臂进行了运动学与动力学模型的构建,把示教机械臂的设计优化描述成一个带约束的多目标优化问题。其中,根据使用者对示教机械臂的性能要求,优化目标还被描述成一个双级优化问题。由于问题的复杂性,传统基于梯度的方法无法实现问题的求解。因此,报告提出采用带约束处理机制的多目标进化算法对本设计优化问题进行求解。
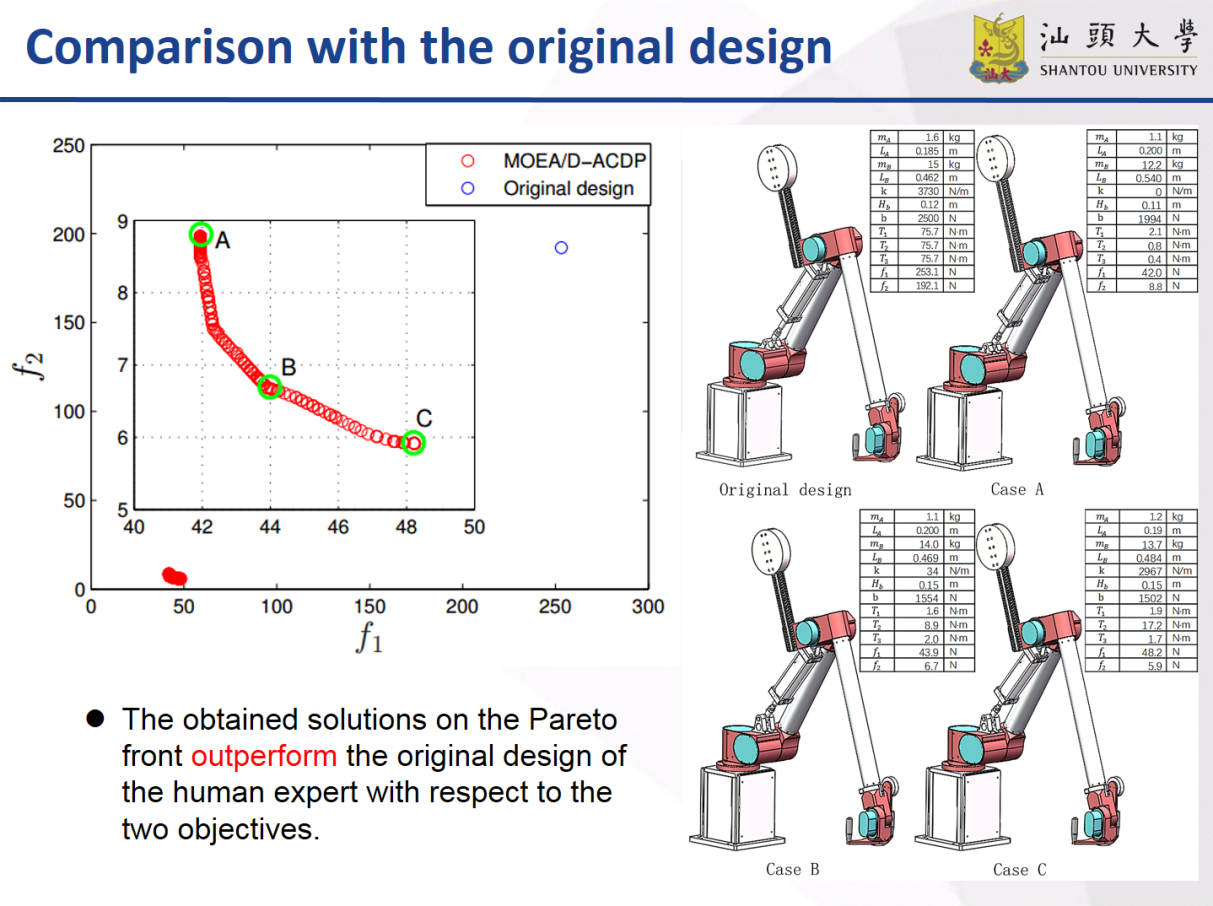
报告具体对比了使用本小组提出的MOEA/D-ACDP算法与流行的MOEA/D-CDP算法,在求解本问题的表现。结果显示本小组提出的MOEA/D-ACDP算法可以求解出更好的Pareto最优解集。同时,报告还把求解结果与工程师原设计进行对比,验证了通过优化问题求解可以获得性能更好的示教机械臂设计方案。
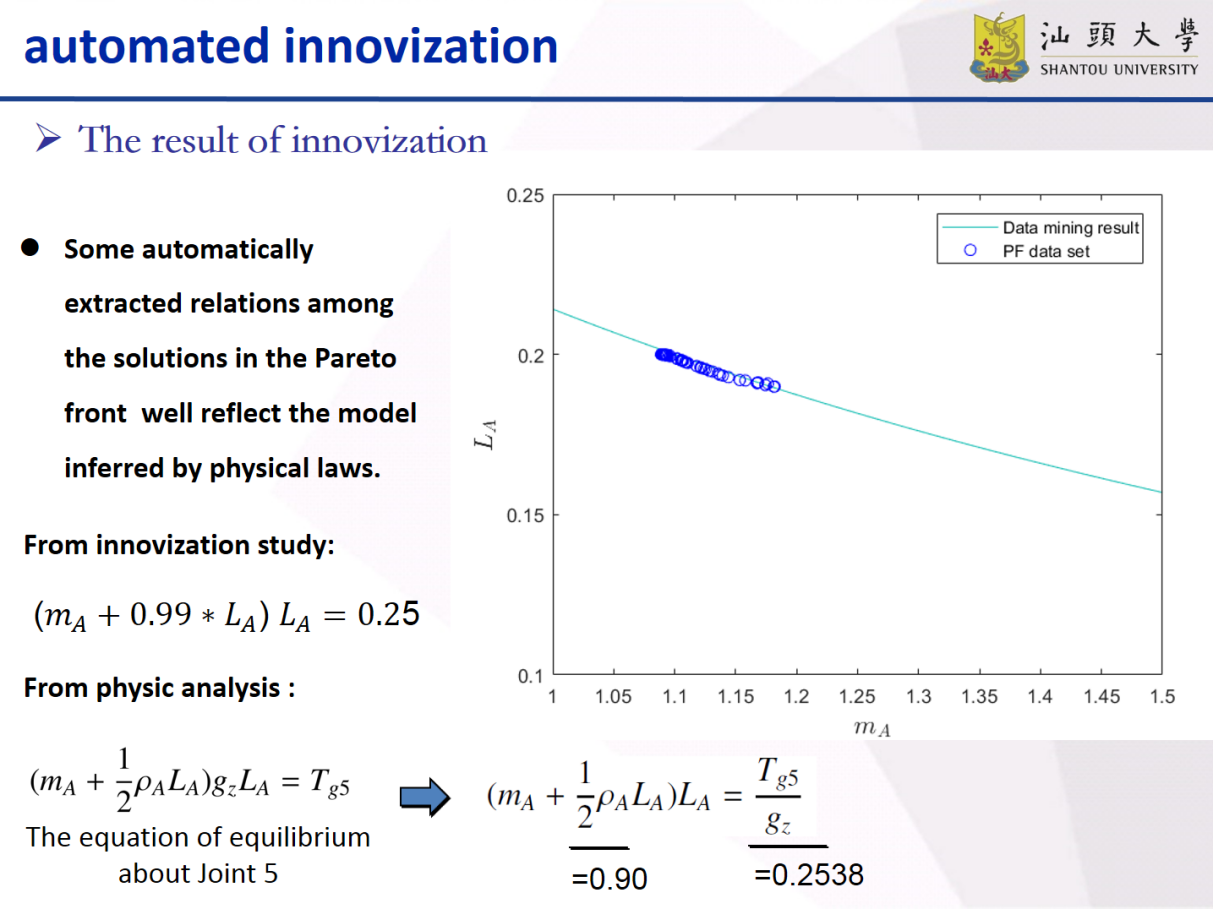
最后,报告还对获得的Pareto最优解数据集进行知识自动提取,结果获得了多条关系式。这些关系式良好地表示了数据集中变量与目标间的关系。经过进一步的对比分析,发现部分关系式与人类依靠物理知识推导而得的关系式相吻合。
下图为报告的目录和主要内容
师生点评:
1、是否获得的所有关系式都能从物理学上面得到解释?是否有方法可以先不通过人为推导,筛选出解释性良好的关系式,再由人进行进一步的判断? |




