随着科技的发展,机器人已逐步应用到人类的工业、生活、医疗养老,物流运输等方面。但传统机械臂无法灵活移动而且需要预先编程才能完成既定的工作,这使得其适用范围受到了较大的限制。未来的机械臂在应用中将不断向可移动化、智能化、人机共融的方向发展,机器人以“人类助手”的角色部分替代或者协助用户完成一些更为复杂的任务。复合机器人(或称移动机械臂)就应运而生。
复合机器人系统通常由一个移动平台、一台或多台机械臂及其末端执行器复合而成,此外还包括多种传感器,以保证机器人具有良好的环境感知能力,完成一些复杂任务。然而现有的复合机器人系统设计方案多采用麦克纳姆结构,该类结构不适应室外恶劣的地面环境(如沙石路面等不平路面),从而限制了其应用范围。为此,项目设计了一款通用型的复合机器人系统Jupiter(如图1所示,其综合性能参数如表1所示)。它采用主动可转向的轮式(actively steerable wheels)结构,可以在室内外环境下保持良好的移动性能。
通用型复合机器人系统Jupiter采用六自由度机械臂与基于四主动可转向轮的移动平台复合而成(硬件结构与信息传递关系,如图2与3所示)。四主动可转向轮平台具有良好的移动性能与地形适应性能,四个车轮的朝向与车轮转速可以独立控制。由于车轮轮径较大,与麦克纳姆轮相比,具有更优异的地形跨越的能力,可以克服凸台、草地等恶劣地型环境(如图4-5所示)。同时,该结构保持了全方向的自由度。配合不同的运动模式(如图6所示),机器人可以进行复杂的轨迹运动:包括侧向平移、原地旋转,甚至绕平面任意中心旋转。
Jupiter系统还配备有激光扫描仪、IMU模块以等传感器,可以实现SLAM功能以及自主导航功能。通过采用Heter SLAM 算法[1],Jupiter可以建立环境的2D地图。基于构建好的地图模型,Jupiter系统结合了Dijkstra算法[2]以及动态窗口法[3],可以实现机器人的自主导航。
为此,实验室专门研发出了一套基于立体视觉的智能抓取方法(如图7所示)。通过采用深度学习方法,采用立体相机的RGB图像对目标进行识别,进而指导对目标点云的分割与目标坐标。通过图像识别的结果选取针对该类目标的动作模板;进一步结合目标点云的分割结果,调整机械臂动作模板的参数,生成适应指定物品的抓取动作并且执行。基于上述方法,Jupiter成功地在实验室模拟环境内,对货架上面的物品进行识别,并且对苹果进行精准抓取及分类。[实验视频]
Jupiter是一款功能强大的通用型复合机器人系统。它具有优秀的移动性能,能适应室内外恶劣的地形环境,并且运动灵活;同时,还具备自主导航以及智能识别抓取目标物品的能力。未来,实验室将继续在Jupiter平台上进行更深入移动操作技术研究,进一步提高系统的智能程度,并用于解决实际应用问题。

图1 复合机器人系统Jupiter
表1 Jupiter的综合性能表格
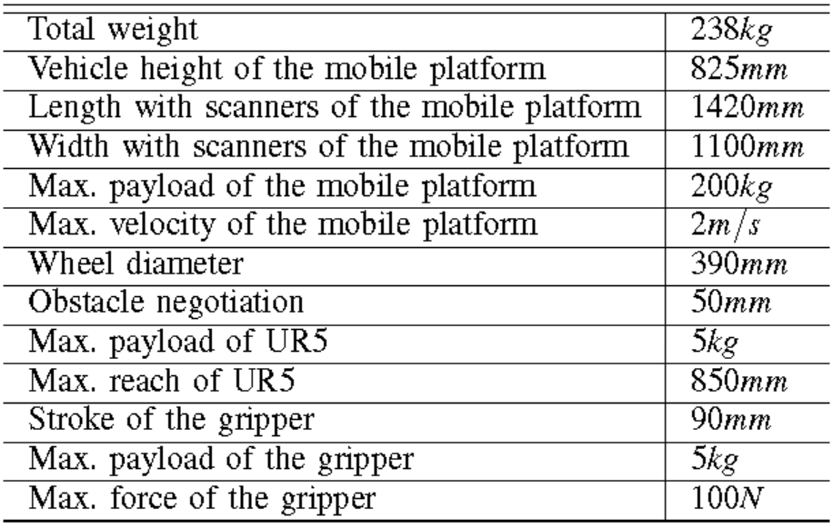
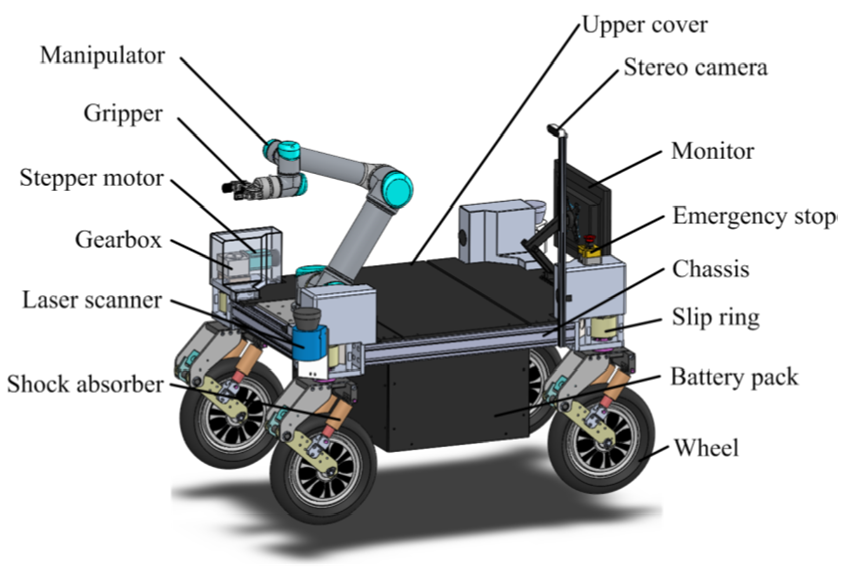
图2 复合机器人Jupiter结构介绍
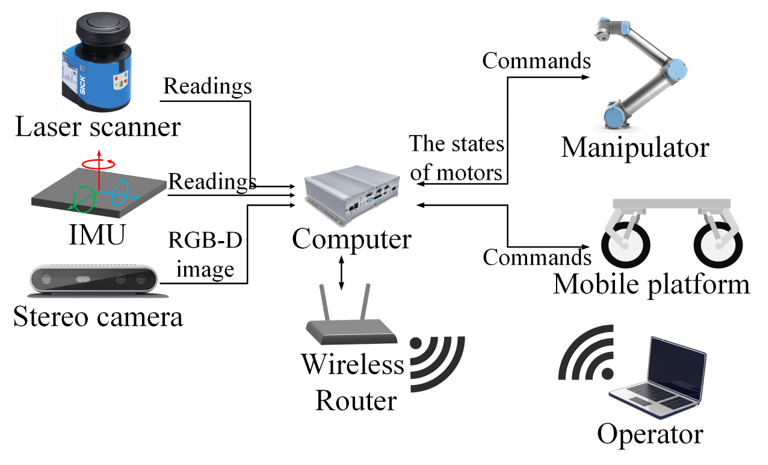
图3 系统的信息传递图
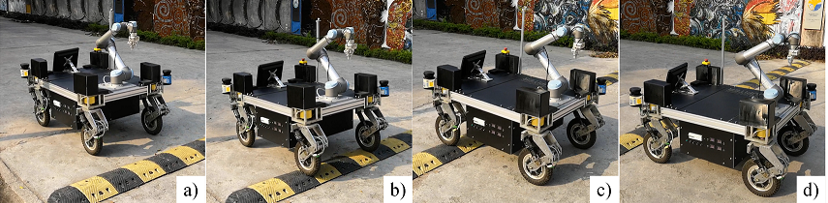
图4 Jupiter跨越减速带的情景
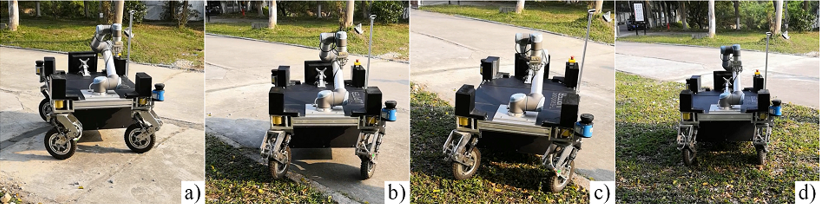
图5 Jupiter在带有碎石及草地运动的场景
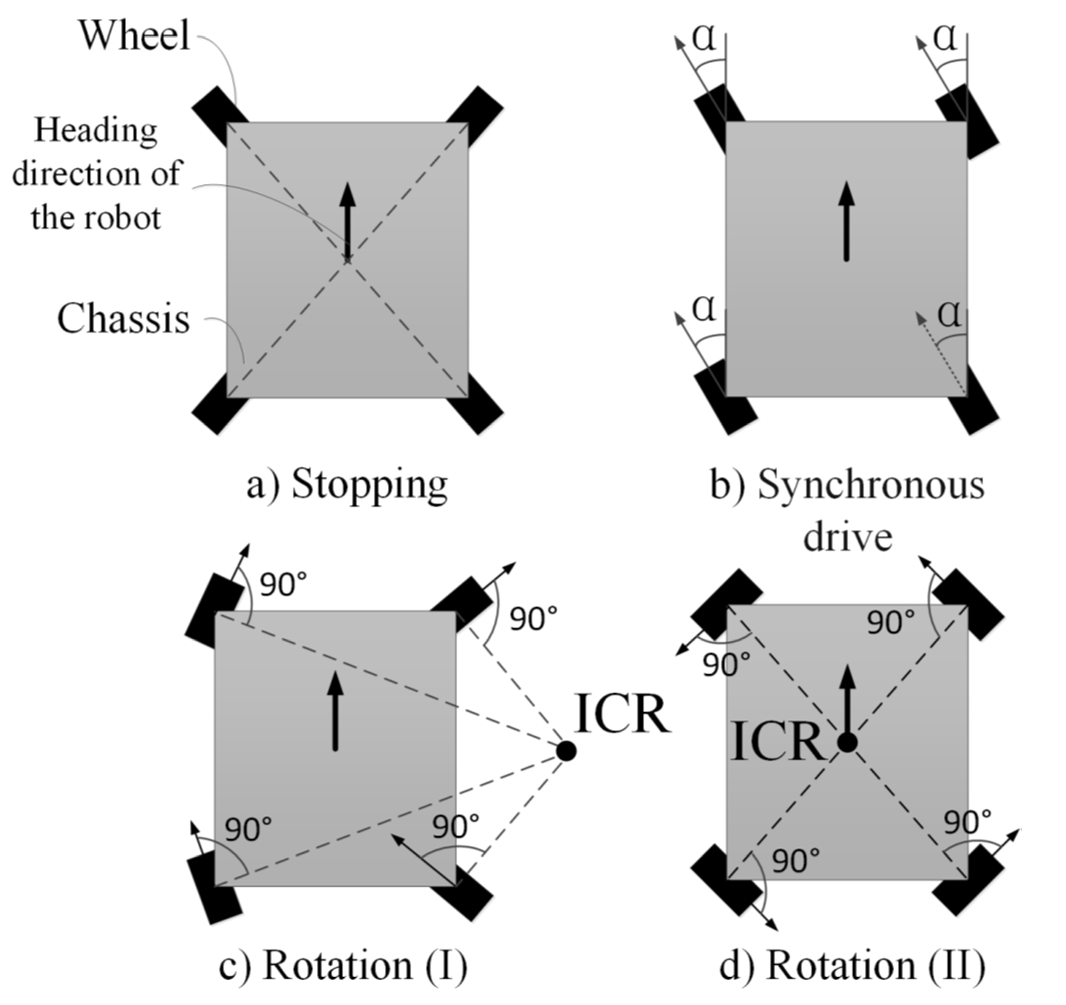
图6 Jupiter移动平台的多种运动模式
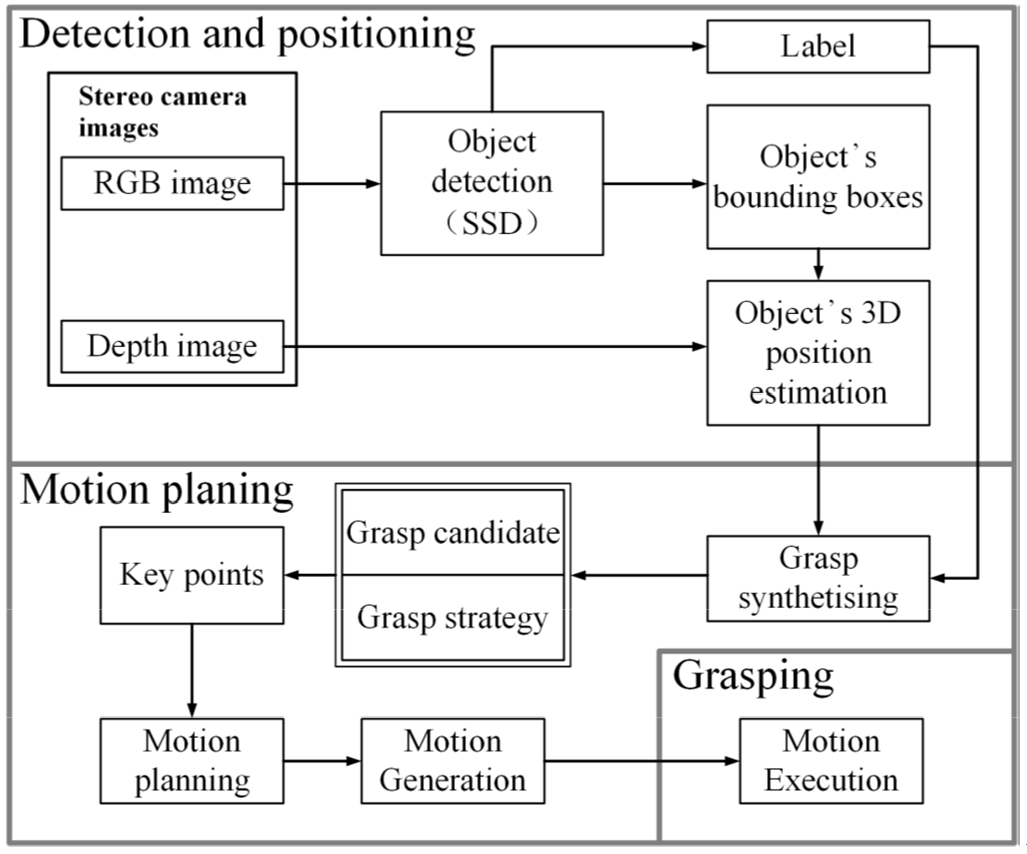
图7 机器人智能抓取算法框架
(相关论文已被CYBER2019会议接收。[PDF下载])
参考文献:
[1] S. Kohlbrecher, O. Von Stryk, J. Meyer, and U. Klingauf, “A flexible and scalable SLAM system with full 3d motion estimation,” in 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics. IEEE, 2011, pp. 155–160.
[2] E. W. Dijkstra, “A note on two problems in connexion with graphs,” Numerische mathematik, vol. 1, no. 1, pp. 269–271, 1959.
[3] D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robotics & Automation Magazine, vol. 4, no. 1, pp. 23–33, 1997.
|




