汕头大学与中国华能海门电厂进行深入合作,联合研发一款用于电厂热力学管道在线修复的带压堵漏特种机器人NEObot。这是全国首款用于协助操作人员进入泄漏现场对管道进行修复的复合型机器人。

图1 带压堵漏机器人样机
在现代电力工业生产中,输气输水容器和管道必不可少,其在生产过程中由于各种原因会产生泄漏,而在管道持续泄漏的情况下容易导致设备损坏和重大人员伤亡,且类似的事故仍时有发生。传统修复方式为专业人员在护具严密保护下,携带维修工具进入现场,对管道进行近距离观察并作业。这种作业方式往往伴随着较高的危险性,容易发生二次事故,造成更大的人员伤亡或财产损失。2016年国家已正式发文取消带温带压堵漏工的职业许可及认定。带压堵漏机器人项目,意在使用机器人取代或协助操作工人进行带压堵漏操作,一方面可以保证人员安全,另一方面借助机器人技术提高带压堵漏的修复质量以及修复效率。

图2 带压堵漏的场景
带压堵漏机器人NEObot运用了多套机器视觉系统,包括热成像、可见光及立体摄像头,可以对管道进行三维重建以及对泄漏位置进行定位。通过探针末端,可以把操作人员的经验知识加入到现场作业环中,微调并确认精确的修复位置;装配捻打末端后,操作人员可在远程控制下将捻打气冲枪固定在待修复管道上,气冲枪末端对管壁进行高速捻打致使材料塑性变形并推移到泄漏位置上,达到快速止漏的效果。
 
图3 带压堵漏末端执行器通过捻打修复管道漏点(实验室模拟环境)[视频3]

图4带压堵漏机器人模型全貌展示
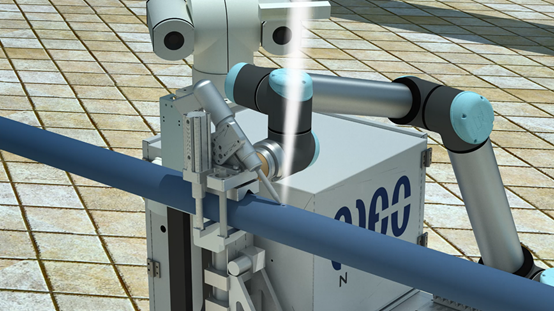
图5 带压堵漏机器人捻打堵漏作业示意图 [视频2]
目前该系统已申请发明专利6项(实审),实用新型5项(实审),软件著作权1项(已授权);相关科技论文正在形成。实验室下一步工作将把带压堵漏机器人NEObot投放在电厂中进行实际场景调试,争取完善样机系统,积极实现产业化落地,解决国内电厂实际泄漏问题。
相关知识产权的申请信息:
发明专利:
[1] 一种基于人工标定管道位置及其漏点的重建方法. 发明. 申请号:201910914815.3
[2] 一种基于双末端的管道漏点定位与修补的设备及方法. 发明. 申请号:201910914812.X
[3] 一种在线带压堵漏的机器人、系统及方法. 发明. 申请号:201910914710.8
[4] 一种具有捻打堵漏的机械臂末端执行器的机器人系统. 发明. 申请号:201910095027.6
[5] 一种用于带压堵漏的机械臂末端执行器. 发明. 申请号:201910095030.8
[6] 一种用于捻打堵漏的机械臂末端执行器. 发明. 申请号:201910101606.7
实用新型专利:
[1] 一种用于捻打堵漏的机械臂末端执行器. 实用新型. 申请号:201920707519.1
|




