
2019年11月4-8日,由电气和电子工程师协会(Institute of Electrical and Electronics, IEEE Engineers,)与日本机器人社区(Robotics Society of Japan, RSJ)联合主办的智能机器人与系统国际会议IROS(IEEE/RSJ International Conference on Intelligent Robots and Systems)在中国澳门举行。IROS是国际机器人与智能系统研究的顶级会议,也是国际影响力最大的智能机器人学术会议之一。
汕头市机器人与智能制造研究院(以下简称研究院)受邀参与了2019 IROS TV视频的采访与制作,研究院执行院长范衠教授对近年学校及研究院在机器人与智能系统领域的科研成果进行了综合介绍。视频在IROS大会上进行了展播,相关研究成果也吸引了海内外众多学者的关注。
同时,范衠教授、研究院研究员游煜根、省重点实验室研究生陈文钊参加了本次IROS会议。在会议上,范教授一行人向参会的各国科研人员介绍了汕头大学及研究院的发展情况与科研成果,并与专家学者在智能机器人研究领域进行了深入交流。

图1 范衠教授接受2019 IROS TV采访视频:https://v.qq.com/x/page/b30195osn9d.html

图2 IROS会议opening ceremony中对实验室复合型机器人的展示

图2 采访视频在IROS会议上进行展播(图中展播为美国BEACON中心主任Eric Goodman教授接受采访的画面。BEACON中心长期与汕头大学范衠教授团队保持合作,并建立了进化计算与机器人国际联合研究中心。)
图4 参会人员合照
在今年的IROS会议上首次亮相的,还包括由汕头大学与中国华能海门电厂联合研发的带压堵漏机器人NEObot(课题名称:用于电厂动力管路在线作业的智能机器人项目),这是全国第一款用于协助操作人员进入泄漏现场对管道进行修复的复合型机器人。

图5 带压堵漏机器人在IROS TV上的演示
在电厂环境下,由于输送冷却水的管道发生破损造成的泄漏事故时有发生。传统修复方式为专业人员携带维修工具进入现场,对管道进行近距离观察并作业。这种作业方式往往伴随着较高的危险性,容易发生二次事故,造成更大的人员伤亡或财产损失。2016年国家已正式发文取消带温带压堵漏工的职业许可及认定。因此,用机器人去协助操作人员来完成带温带压堵漏作业,具有非常广阔的市场前景以及积极的社会意义。
带压堵漏机器人NEObot运用了多套机器视觉系统,包括热成像,可见光及立体摄像头,可以对管道进行三维重建以及对泄漏位置进行定位。通过探针末端,可以把操作人员的经验知识加入到现场作业环中,微调并确认精确的修复位置;装配捻打末端后,操作人员可在远程控制下将捻打气冲枪固定在待修复管道上,气冲枪末端对管壁进行高速捻打致使材料塑性变形并推移到泄漏位置上,达到快速止漏的效果。
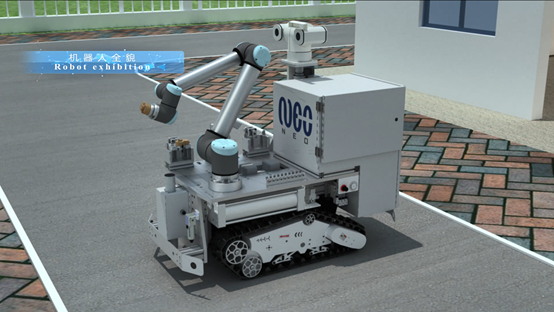
图6 带压堵漏机器人模型全貌展示
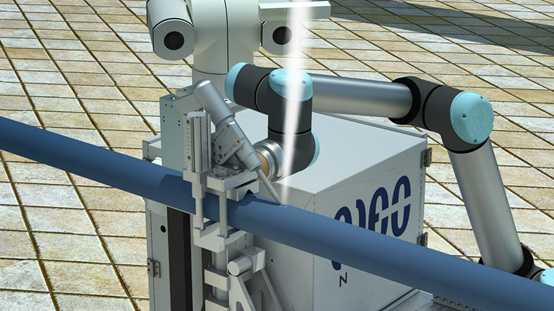
图7 带压堵漏机器人捻打堵漏作业示意图
目前该系统已申请发明专利6项(公开),实用新型5项(受理),软件著作权1项;实验室下一步工作将把带压堵漏机器人NEObot投放在电厂中进行实际场景调试,争取完善样机系统,积极实现产业化落地,解决国内电厂实际泄漏问题。
|




