工业机械臂已经广泛应用在流水线生产车间,但机械臂的示教依然是一项冗长而耗时的工作。特别是一些面向中小批量生产的制造型企业,因加工对象的变化需要对机械臂频繁地重新设计新的操作轨迹,并在控制系统中进行路径编程及示教。而传统的示教方式需要操作人员进行代码编程,或者采集大量的关键点让系统进行路径的自动拟合。两种方式的轨迹示教都是耗时、费力的。为此本文采用进化设计的方法设计了一款6自由度示教机械臂,可对生产线上工业机械臂进行快速轨迹示教(如图1所示)。

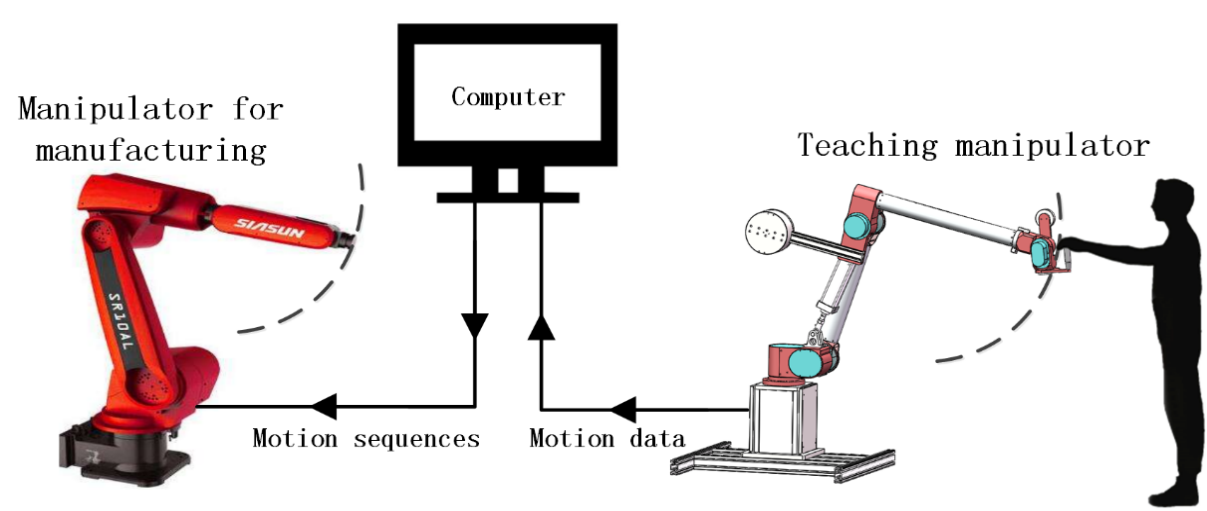
图1 示教机械臂的工作示意图
在生产示教过程中,熟练技工的操作手感直接影响轨迹操作的质量,因此需要对示教机械臂的操作力进行专门的优化设计。课题组把该示教机械臂的设计问题描述成一个约束多目标优化问题:其中为了保证操作者的良好手感,采用了同时最小化操作轨迹最大操作力及操作力的极差作为优化问题的两个目标,同时保证重力敏感的关节在轨迹上保持静平衡。
文章通过采用基于PPS(Push and Pull Search)框架的两种约束多目标进化算法PPS-MOEA/D和PPS-M2M对示教机械臂设计优化问题进行求解,获得了比人类工程师设计更优的设计方案(如图2所示)。同时通过与几种经典的约束多目标进化算法(MOEA/D-ACDP, MOEA/D-CDP, NSGA-II-CDP 以及 CM2M)进行对比,我们发现采用PPS框架,可以有效的提升对应算法在解决机器人实际优化问题的性能(如图3所示)。
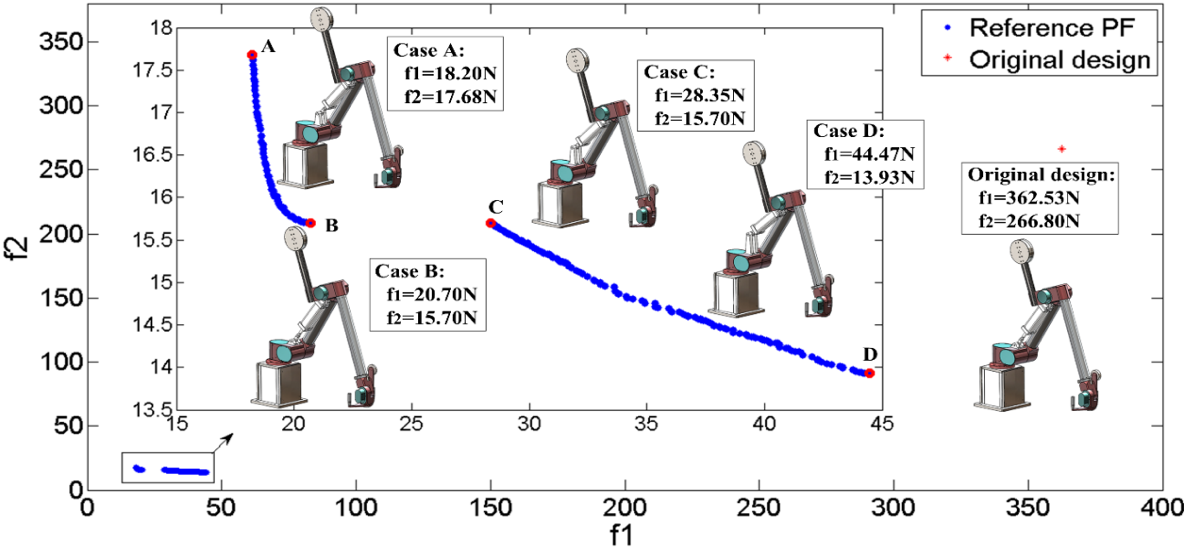
图2 获得的Pareto前沿上的四个端点个体与工程师设计方案对比图
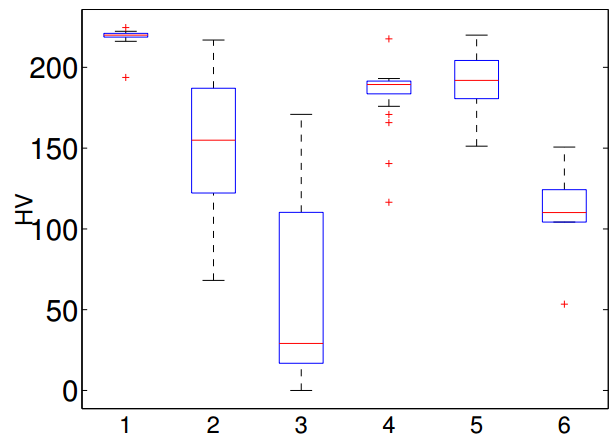
图3 对问题进行30次独立重复试验的HV值箱线图
(其中1-6依次分别表示PPS-MOEA/D, PPS-M2M, NSGA-II-CDP, MOEA/D-ACDP, MOEA/D-CDP, CM2M)
这项工作进一步验证了PPS框架在解决约束多目标优化问题和实际工程问题的优异性能。由于机器人系统设计往往可以归结成一类约束多目标优化问题,PPS框架有望在未来更好地解决更多的机器人设计优化问题,推动机器人系统设计自动化的发展。
论文下载:Download PDF
专利:范衠, 游煜根, 朱贵杰, 等. 一种自平衡示教机械臂. 专利号: 201721096302.9
论文引用:Zhun Fan, Yugen You, Xinye Cai∗, Haodong Zheng, Guijie Zhu, Wenji Li, Akhil Garg, Kalyanmoy Deb, Erik Goodman. Analysis and Multi-objective Optimization of a Kind of Teaching Manipulator, Swarm and Evolutionary Computation. (Accepted, SCI计算机科学—人工智能学科1区, IF=6.33)
相关视频:示教器视频点击:[视频1] 上位机视频点击:[视频2] 点数据采样视频点击:[视频3] 跟随操作视频点击:[视频4] |




