2018年10月7日,广东省数字信号与图像处理技术重点实验室本学期第一次学术研讨会于人工智能与机器人实验室成功召开。本次研讨会共由一名博士生和七名硕士生带来报告,分别是陈文钊、姜涛、卢杰威、卞新超、王诏君、黄龙涛、袁宇彤、李冲。
主讲人介绍:

陈文钊,1995年,2017级硕士研究生,研究方向:移动机器人,复合机器人。导师:范衠

姜涛,1995年,2017级硕士研究生,研究方向:图像处理。导师:范衠

卢杰威,1993年,2016级硕士研究生,研究方向:图像处理及应用,深度学习。导师:范衠

卞新超 2017级研究生 研究方向:视觉SLAM 。导师:范衠

王诏君,1992年,2017级硕士研究生,研究方向:多目标进化算法。导师:范衠

黄龙涛,1995年,2017级硕士研究生,研究方向:图像处理,深度学习。导师:范衠

袁宇彤,1993年,2017级硕士研究生,研究方向:进化算法和群体智能。 导师:范衠

李冲,1990年,2018级博士研究生,研究方向:SLAM、机器视觉、深度学习。导师:范衠
学术交流例会现场
陈文钊硕士报告
题目:
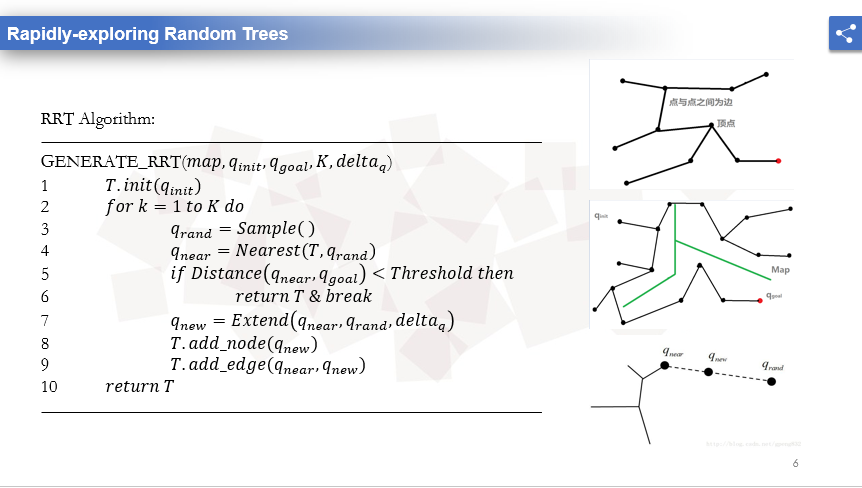
Introduction and Application of RRT Algorithm
报告的主要内容:
报告介绍了路径规划算法中的快速随机树算法的起源及变种,针对实验室的合作横向项目康云室内移动机器人,提出课题研究的重点为室内自主探索问题。针对探索问题,调研了相关的文献工作。针对最新的RRT算法变种在探索领域的应用,尝试了不同仿真环境下的实验并进行了分析。同时还在实验室真实环境下进行了探索过程的测试,报告最后作了下一步工作计划阐述,主要为引入视觉及其他传感器来提高探索过程的安全性及鲁棒性。
下图为报告的目录和主要内容



师生点评:
1、可以在报告中添加工作motivation的描述。
姜涛硕士报告
题目:
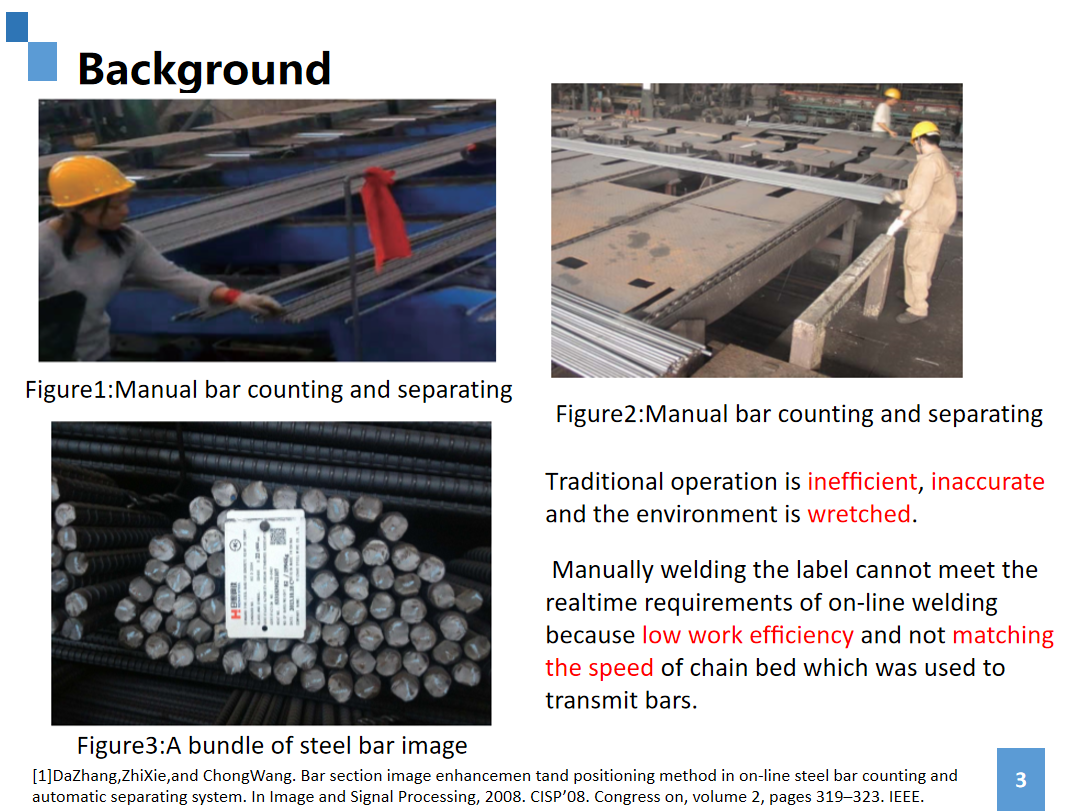
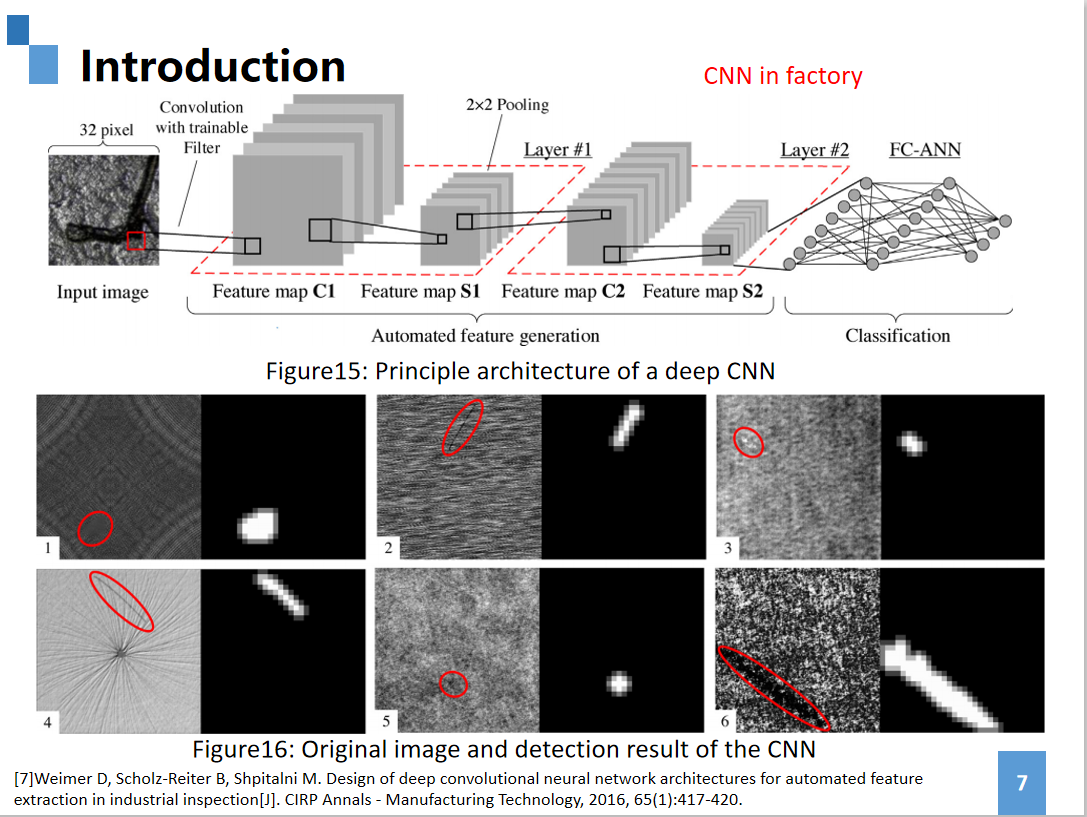
基于卷积神经网络实现钢筋端面的识别
报告的主要内容:
首先,介绍了现阶段在工厂环境中,对钢筋端面识别的研究现状及其问题做了描述。工业应用与深度学习的结合现阶段是不够的,因此我们设计了一种方案有效将深度学习适用于特定的工业应用。接下来介绍了在数据准备阶段,方案使用了滑窗法对原始图片进行取样,得到训练CNN所需要的正样本和负样本。接下来简要描述了CNN的结构并使用聚类的方法得到最终钢筋端面的中心。最后展示了我们的实验结果,总结方法和描述我们的下一步工作。
下图为报告的内容和目录
师生点评:
1、偏移量要查阅相关文献后准确定义。
2、报告中有一些基本语法错误及单词拼写错误。
3、后期增加实验说明。
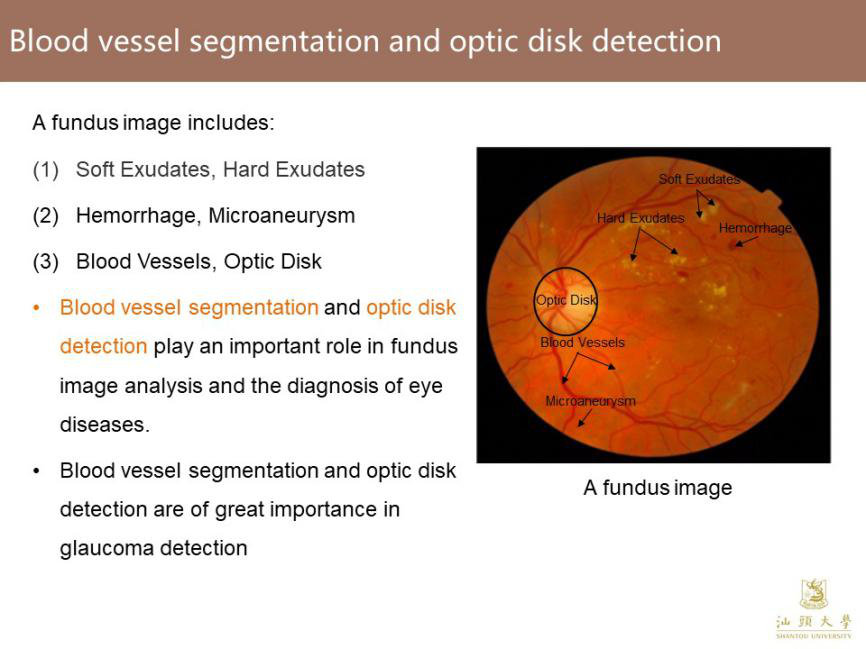
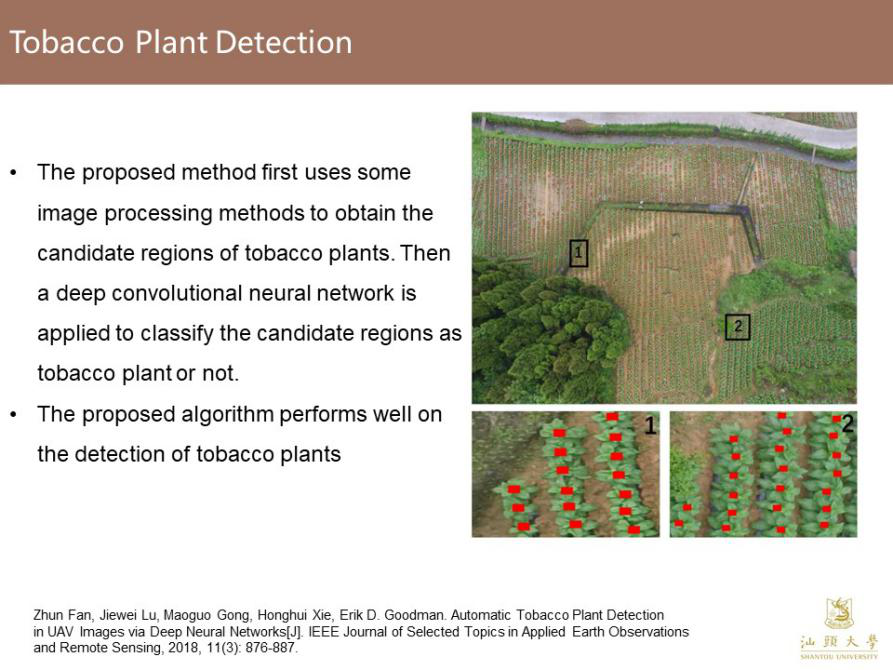
卢杰威硕士报告
题目:
图像处理项目介绍
报告的主要内容:
报告对本人工作进行了介绍,包括眼底图像视盘和血管提取,烟草植株的检测,斜眼检测,海洋所海豚识别项目,并且总结本人研究期刊所参考的资料,分享了做研究的经验。
下图为报告的主要内容:
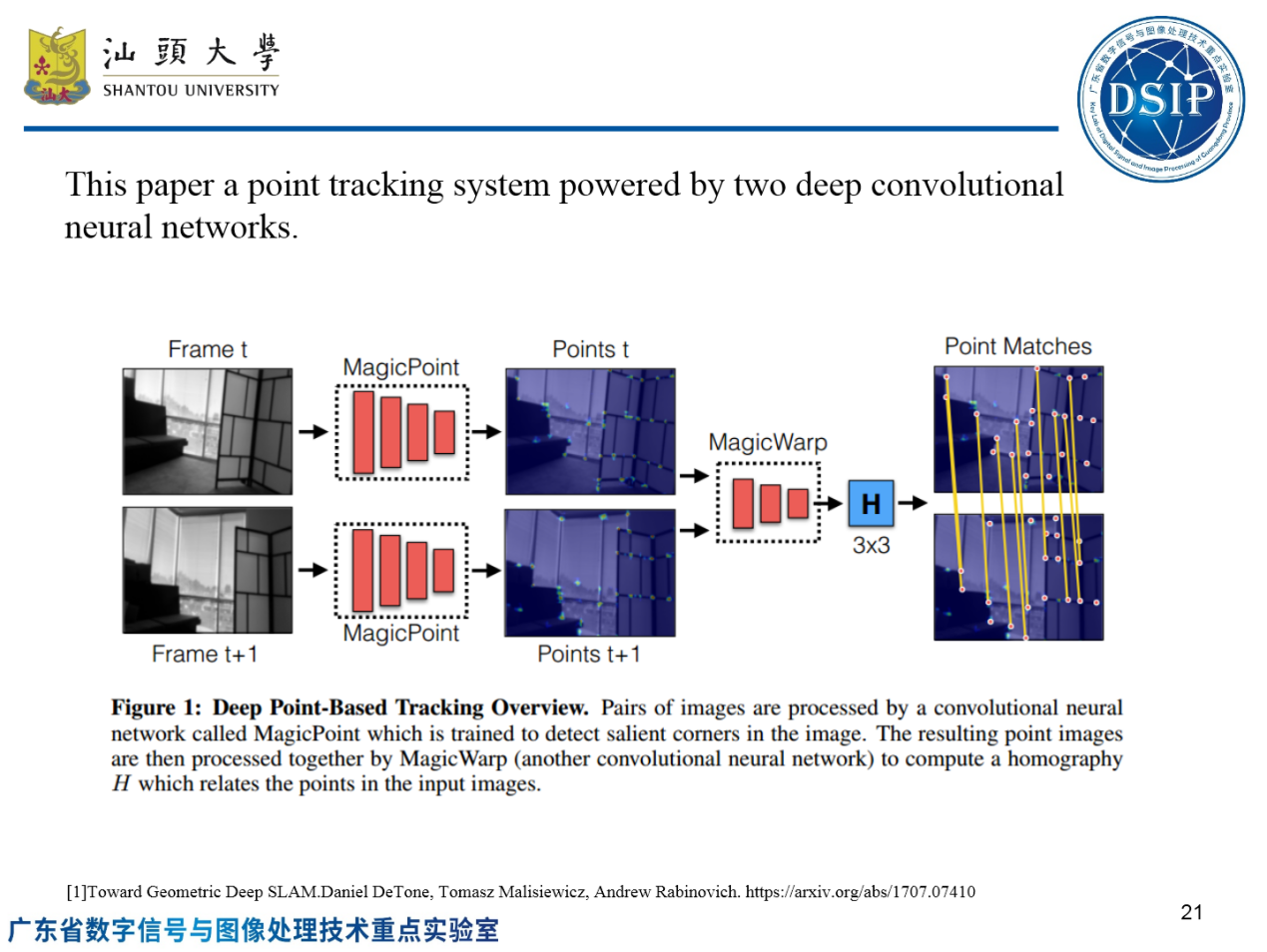
卞新超硕士报告
题目:
基于深度学习方法提取线特征
报告的主要内容:
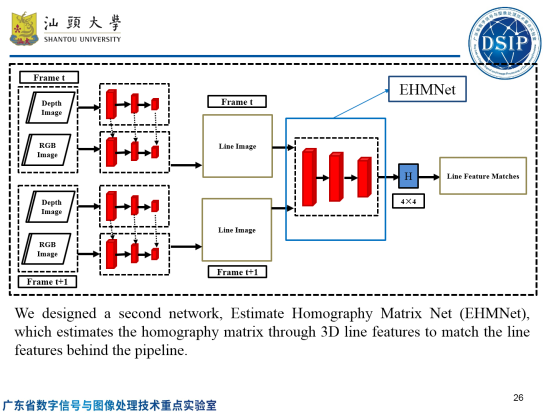
在楼道,地下车库等在结构化的环境和运动模糊中点特征是缺失的,线特征是比较丰富的,目前常规的方法是传统几何线特征或电线特征结合的方法来获得变换矩阵来实现机器人或者无人车的定位问题,上述方法存在系统不稳定,受光照,运动模糊影响较大,我们基于深度神经网络学习的方法提取线特征来克服系统不稳定,我们整体框架是通过卷积神经网络提取结果化环境中的线特征,我们再利用卷积神经网络学习线特征来生成变换矩阵实现定位问题。
下图为报告的目录及主要内容:

王诏君硕士报告
题目:
基于自变量编码方式改进的机械臂路径优化
报告的主要内容:
结合路径规划算法与智能优化算法对机械臂末端的执行路径进行规划和优化。以机械臂运动学和动力学理论研究为基础,以机械臂路径的中间路径点以及相邻两路径点的时间间隔为研究变量,以量消耗和执行时间为优化目标,加入动力学约束和环境约束,以实现能量消耗较少,执行时间较短为目的。本文主要提出一种机械臂路径优化解决方法。即采用自变量编码方式直接对整个机械臂路径优化问题进行求解。
下图为报告的目录和主要内容:


黄龙涛硕士报告
题目:
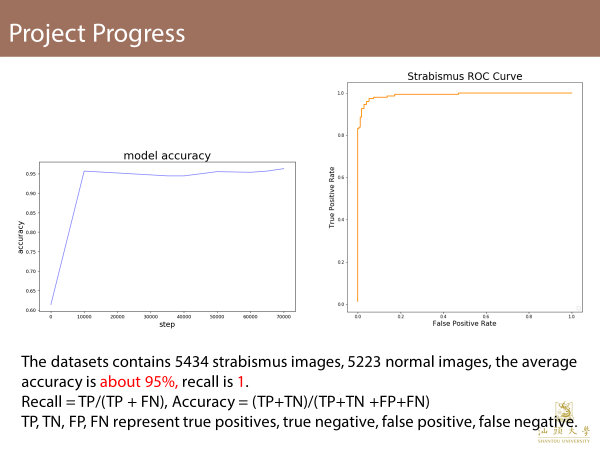
Strabismus Recognition Using Convolutional Neural Networks
报告的主要内容:
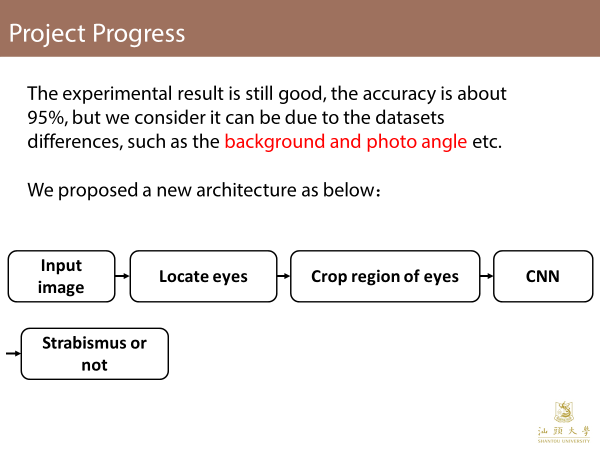
报告主要讲述了在医学领域的斜眼检测中通过当前流行的深度学习算法对眼科医生进行辅助诊断。具体来说,通过深度学习技术对斜眼图片进行检测,输出是否斜眼的结果。它首先通过目标检测算法对眼部区域进行检测并裁剪定位框内区域图像,输入卷积神经网络进行识别斜眼与否。在报告中给出了实验结果。
下图为报告的目录以及主要内容:
袁宇彤硕士报告
题目:
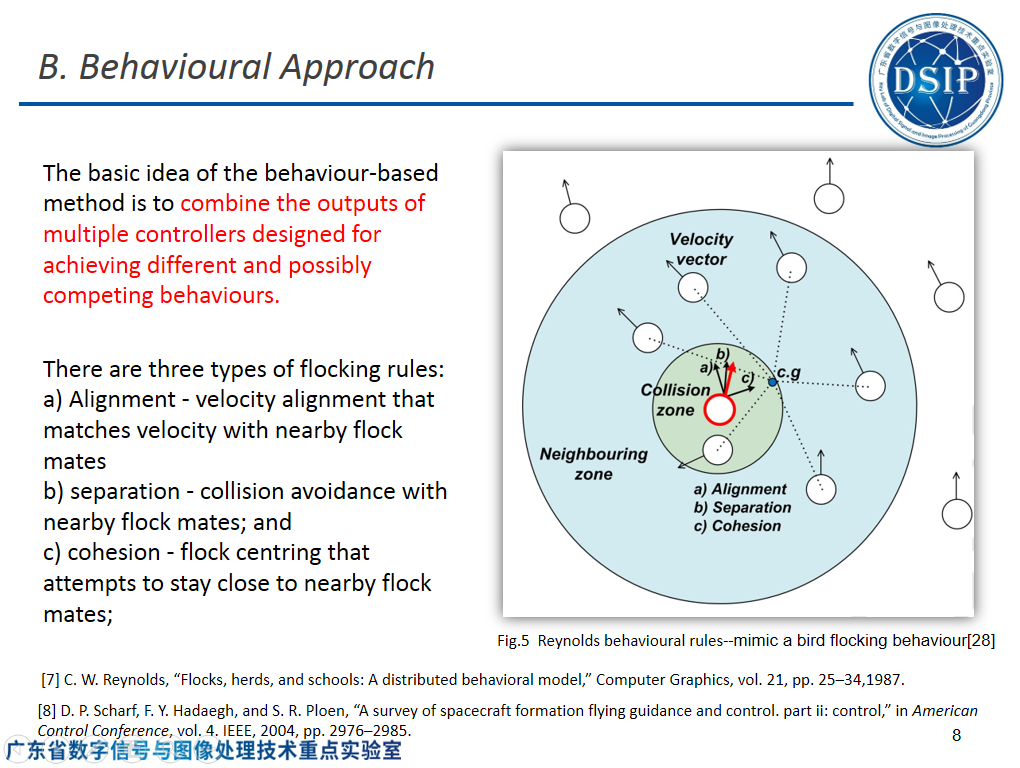
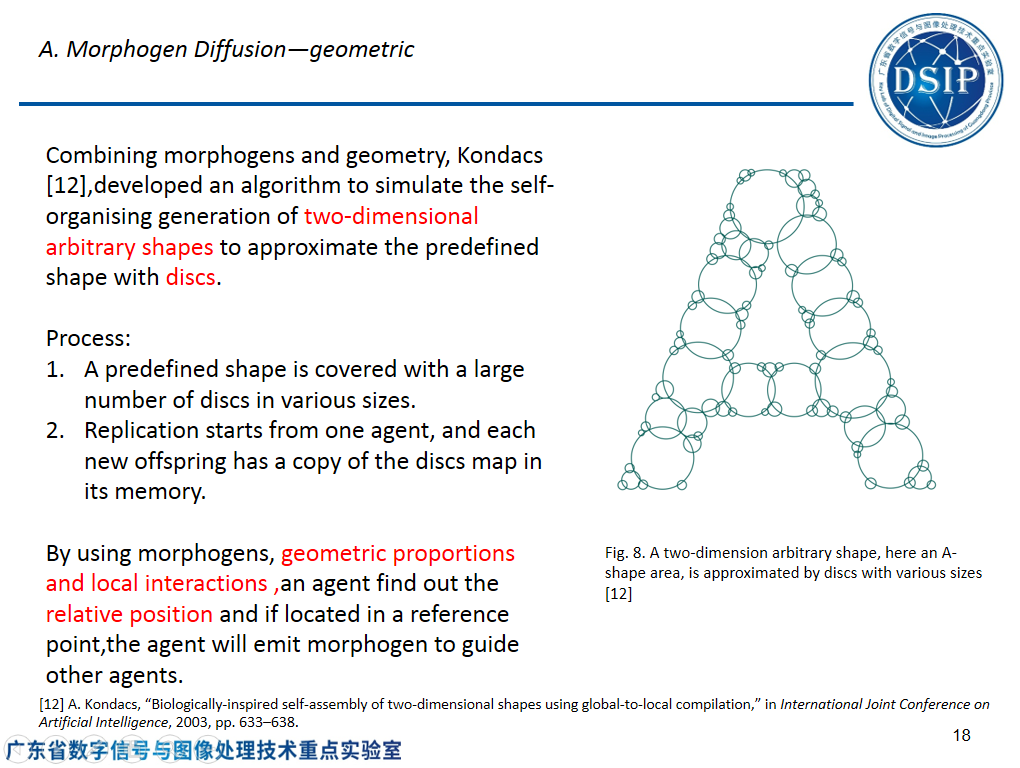
基于仿生的自组织多机器人模式(Bio-inspired self-organising multi-robot pattern formation)
报告的主要内容:
报告讲述了现在群体智能在形成构型上的现状以及存在的问题,针对宏观和微观下的形成方法分别作了讲述。在群体智能中,理解复杂构型涌现的关键理解自组织系统,群体复杂的行为应该是基于群体间简单的互动和局部环境的信息实现。其中,宏观的构型形成方法有结构描述方法和基于行为的描述方法;微观的方法中有成形素扩散方法、应激-扩散方法、基因调控网络和趋化(药)性。报告中,对上述方法都作了一一介绍。
下图为报告的目录和主要内容

师生点评:
1、最近,有新文章用基因调控网络来做构型的吗? 答:有的,但比较少。
2、这里的基于Consensus的方法都是一阶的? 答:是的,这只是一个介绍,可以使用更高阶的系统。
李冲博士报告
题目:
Investigation of the Crack Detection Based on Deep Learning
报告主要内容:
首先讲解了道路以及桥梁的裂缝检测研究方面的背景;其次介绍了基于深度学习的裂缝检测方面的论文调研情况;最后报告了下一步的研究计划和方向。
报告的目录和主要内容:

 |




