近年来,随着机器人应用领域不断的深入人类的生活,以及无人驾驶汽车的迅速发展,计算机科学、图像处理技术、人工智能等领域技术的快速更新,多学科交叉的智能机器人技术开始逐步应用在人们的日常生活之中,例如家庭扫地机器人、仓库运输智能移动机器人、外卖机器人等等。
本课题是一种基于ROS操作系统,融合了激光雷达数据和深度相机两种传感器同时构建二维和三维栅格地图的方案,使用激光雷达和蒙特卡罗定位算法来解决地图构建过程中的定位问题,充分利用激光雷达能够做到更精确的定位的优势,结合深度相机获取三维点云辅助构建三维地图。其中激光雷达定位重点研究结合了非线性滤波算法在移动机器人中的地图构建的问题,一种基于Rao-Blackwellized粒子滤波的SLAM算法,可以提供可靠的定位信息。而深度相机的优势获得环境中更为具体的三维环境信息,配合激光获取的定位信息实时的构建三维八叉树地图。两种地图的结合可以应用于机器人在二维环境中的路径规划以及装配有机械臂的复合型机器人在三维空间中机械臂的碰撞检测和路径规划等问题。
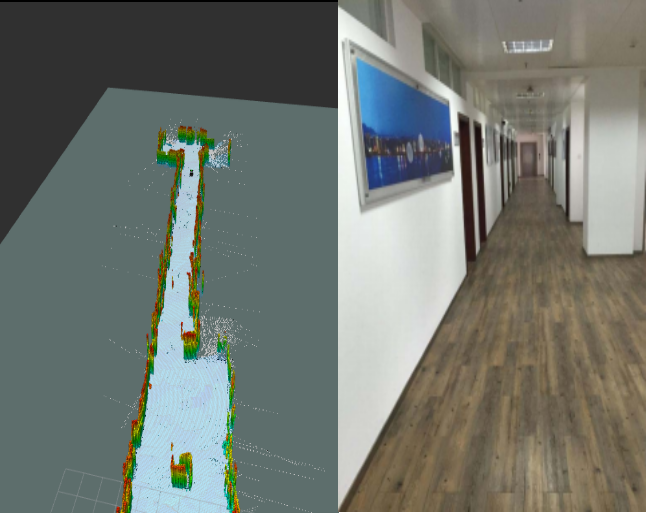
图一 汕头大学科技楼四楼构建出二维和三维栅格地图
已发论文:A SLAM with Simultaneous Construction of 2D and 3D maps Based on Rao-Blackwellized Particle Filters(Accepted by The 10th International Conference on Advanced Computational Intelligence 2018) |




