机器人手臂大量应用于工业、农业生产,帮助人们完成重复、繁重的劳动;也应用于服务业,帮助老年人、残障人应对生活中的不便。为了保证机械臂强度与刚度的要求,传统的设计方法通过简化模型计算或者系统集成使其存在较大的强度和刚度冗余。这导致了材料用量大、能耗高、转速低等问题,不符合当前制造设备轻量化、节能高效的发展趋势。项目组采用设计自动化的方法对复合型机器人专用机械臂进行了自动优化设计,共开发了3代机械臂样机,如图一和图二所示。图三为机械臂关节坐标轴示意图和MATLAB仿真图。
复合型机器人6轴机械臂工作参数为:6自由度,工作范围850mm,重复定位精度0.1mm,末端负载10kg,总功率750W。
复合型机器人6轴机械臂采用总线形式控制且每个关节均配备高精度绝对值编码器。
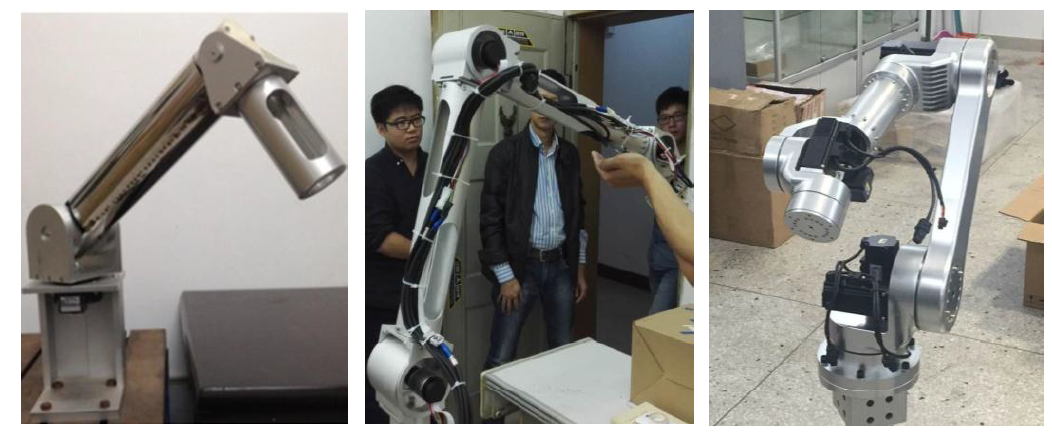
第一代 第二代 第三代
图一 项目组设计开发的3代复合型机器人专用机械臂

图二 复合型机器人专用机械臂第III代样机
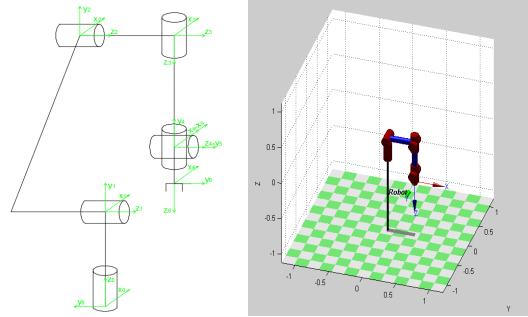
图三 各关节坐标轴示意图及MATLAB仿真图
演示视频:[复合型机器人专用机械臂] |




