机器人一般需要进行计算密集型的任务,环境感知、路径规划,自主导航,物品抓取等。但由于本身功率及载重的限制,造成了机器人智能程度与机载设备之间的矛盾,为了有效地解决如何在处理能力有限的机载设备下提高机器人的计算性能,云机器人是重要的研究途径。

图一 云平台Rapyuta
为了使机器人作出更智能的决策以及协助人类在作战或特殊环境下的任务执行,环境感知是最基础也是极其重要的一环。异构多机器人的环境感知融合,利用不同种类机器人的观测,增强对环境的整体感知程度,实现“深入了解环境情况,从更远距离发现威胁”的目标。
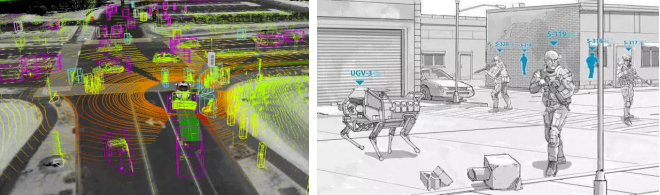
图二 自动驾驶及战场中的环境感知
本项目主要解决了单机器人计算能力与机载负担之间的矛盾,实现开发的服务快速部署与异构机器人平台,并可弹性分配和管理资源;异构机器人之间的实时通信,任务协同将作为项目的基础,整体架构将可提高机器人在大型复杂环境下的感知能力以及建图速度。本项目的主要创新点如下:
-
基于数据分发模型设计的通信机制,保证了实时性及鲁棒性。
-
融合容器技术及ROS,实现了服务的松耦合,即部署即用。
-
基于快速搜索随机树算法的多机器人环境探索感知。 基于RGB-D SLAM及ORB-SLAM的异构机器人3D建图融合。
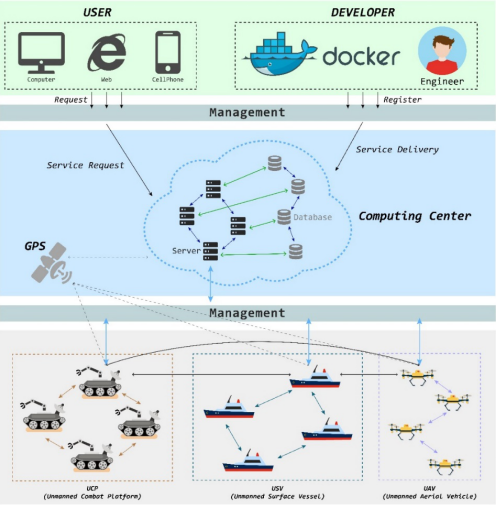
图三 基于Docker和DDS的云机器人框架 |




