2019年6月1-2日,为期两天的2019年“中关村(济南)产业基地杯”中国服务机器人大赛在济南舜耕国际会展中心成功举办!
本次大赛由中国自动化学会、教育部高等学校自动化类专业教学指导委员会、济南市政府主办,天桥区人民政府、济南新材料园区管委会及中关村(济南)产业基地承办。共吸引了同济大学、上海大学、汕头大学、郑州大学、火箭军工程大学等全国121所大学的2000多名大学生和400名指导老师参加大赛。


中国服务机器人大赛是国内最具影响力、最具权威性的服务机器人比赛,旨在推动服务型机器人的研制和市场应用,加强各高校之间、研究单位之间的交流和合作。从2011的第一届到2019的第九届,中国服务机器人大赛在社会上得到的关注越来越多,吸引了更多国内高校与公司参与比赛,赛事的难度与质量也在不断提高。
汕头大学NEO团队曾参加了2016年及2017年的中国服务机器人大赛,并在当时获得了不错的成绩。但根据以往的比赛经验分析,虽然NEO团队获得一定的名次,但实际上对于比赛的整体完成度并不高。随着机器人技术的不断发展以及近年来深度学习在图像、机器人领域的爆发式应用。NEO团队决定重启对中国服务机器人大赛的Follow项目及WhoIsWho项目的全面研究,旨在以更鲁棒、更优更快的机器人系统去完成整个比赛。
从2019年4月底确认比赛规则后,NEO团队成员对自主研发的服务机器人StellaX进行了底层的再优化与设计,解决了如485总线控制下多电机的同步控制问题,由差速造成的电机失速停止问题等;并对StellaX的底层芯片进行更换和程序的优化,使得StellaX具有更稳定鲁棒的运动能力。
同时,为了增加机器人对未知环境的认知能力以及运算能力。StellaX新增了Realsense立体摄像头用作环境信息捕捉以及NVIDIA Jetson TX2用作对环境图像信息进行分析处理。双运算平台及立体摄像头的加入,使得StellaX可以完成更复杂的任务,如人脸识别。实时人体骨架提取,身体姿态分析,多干扰下的目标跟踪控制等;对比赛的规则有了更优的解决方案。


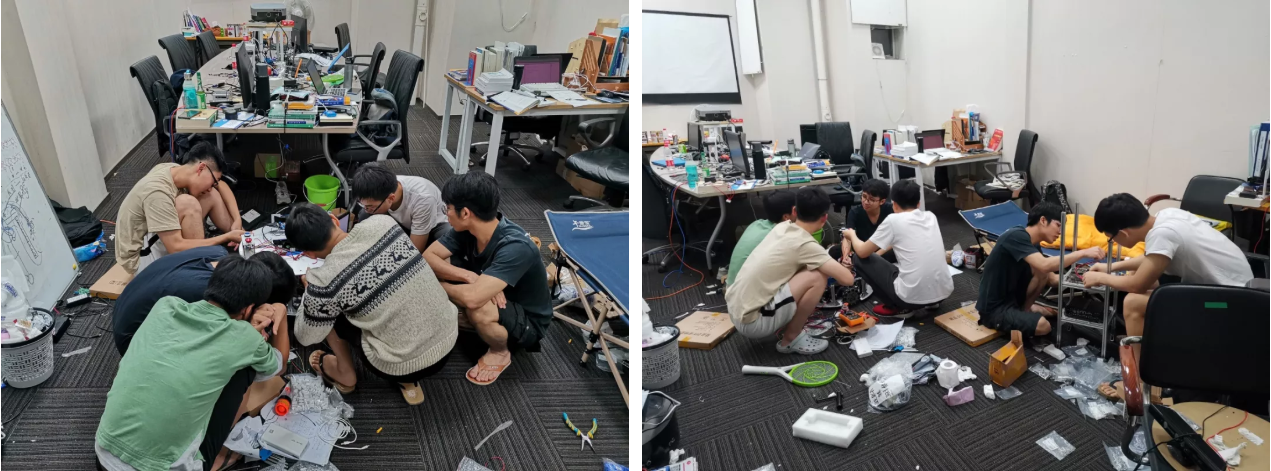
历经一个月的开发,NEO团队带着新版的StellaX来到山东济南的比赛场地,在对比赛场地进行现场分析和相关规则的讨论后,NEO团队马上进行了最后的功能调整和现场测试。



NEO团队在WhoIsWho场地进行最后的调试
最后,NEO团队在比赛中出色的完成了比赛任务,实现了所设计的功能,机器人在现场也表现出比之前都要好的鲁棒性和智能性。均以较好的成绩获得了Follow项目及WhoIsWho项目的全国二等奖!

虽然NEO团队在本次比赛中获得了不错的成绩,但在比赛中其他机器人同样有非常不错的精彩表现。队员们也都看到了StellaX与商用机器人之间的差距和进步的空间。NEO团队会对这些问题做一步的总结和分析,力求StellaX做到工程、算法齐头并进。在机器人的领域继续深耕细作,更进一步。

 |




