智能小车Pluto是由汕头大学人工智能与机器人实验室与汕头轻工装备研究院合作开发的一款科教型机器人平台。其主要由平台本体及手机APP两部分组成。机器人平台可以在手机APP控制下实现经典遥控(上下左右按键遥控),划线控制以及语音控制等多种控制方式。
Pluto车体为两轮移动平台,采用差分控制的运动模式,小巧轻便,运动灵活。机器人平台面板上设置有多种传感器以及扩展接口,使机器人平台能实现各种复杂的功能。
Pluto有丰富的控制模式。依靠APP,用户手机可以方便地与机器人进行连接,并可以灵活切换控制模式。

图1 Pluto车体结构
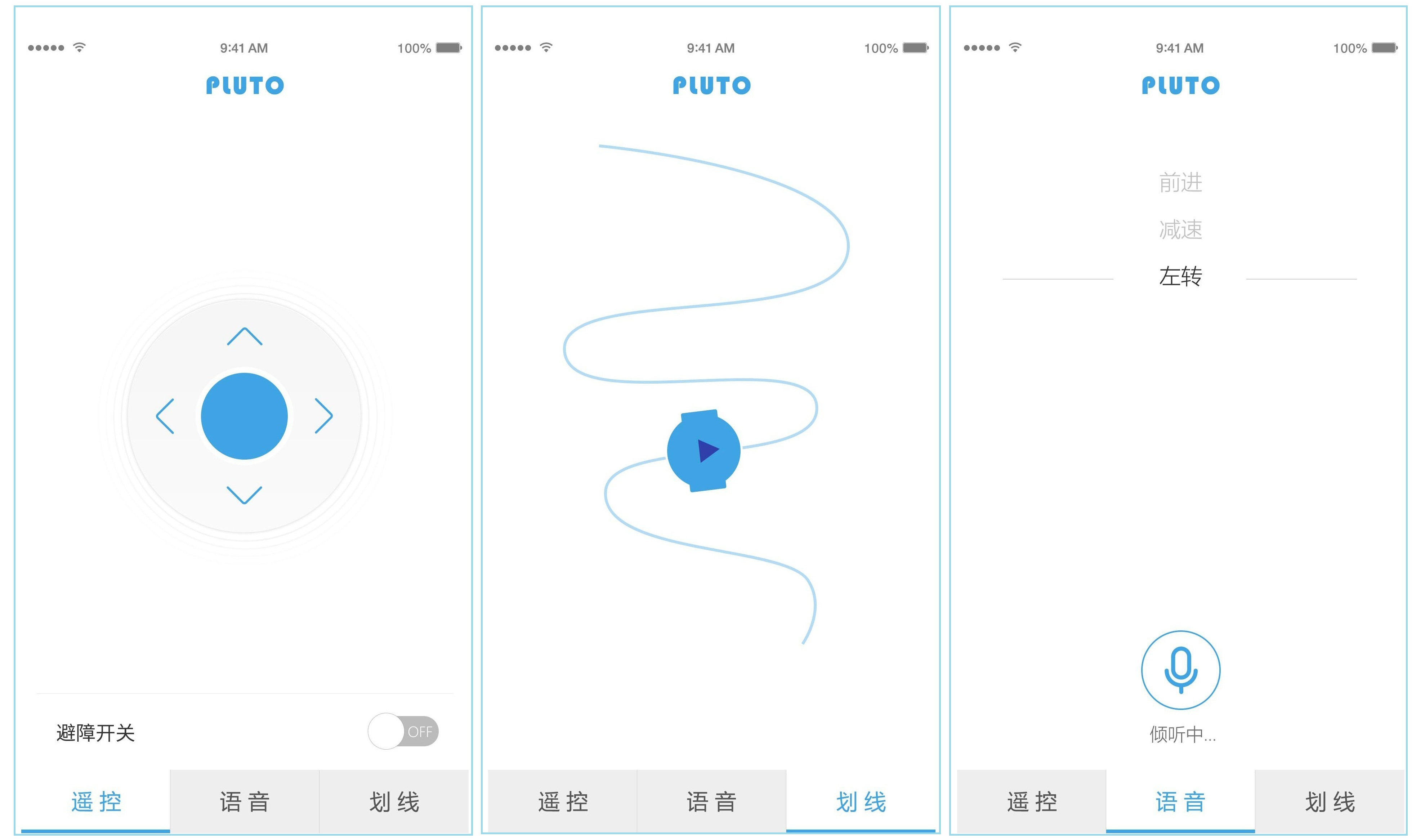
(a)遥控模式 (b)划线控制 (c)语音控制
图2 Pluto的控制模式
在遥控模式下,用户可以实现对机器人运动的遥控,同时还能进行自动的规避障碍,如图2(a)所示。在划线控制模式下,机器人能验证用户在屏幕划线的轨迹进行运动,并在界面上实时显示轨迹的运行进度,如图2(b)所示。在语音控制的模式下,用户可以通过语音命令,实现对机器人启停、运动、加减速的控制,如图2(c)所示。
演示视频地址点击[演示视频]
|




