|
序号 |
设备名称 |
设备型号 |
|
1 |
3D打印机 |
Raise3D N2 |
|
2 |
交互式虚拟现实系统 |
WorldViz |
|
3 |
机器视觉设备(大疆实验系统) |
机器视觉实验箱;旋转式机器视觉实验系统;平移式机器人视觉实验系统;线阵检测实验系统;双目立体视觉实验系统 |
|
4 |
Optitrack光学动作捕捉仪 |
NaturalPoint Optitrack P3 |
|
5 |
大疆无人机 |
“御”Mavic Pro |
|
6 |
蛇形机器人(2套) |
VLong1蛇形 |
|
7 |
单反相机 |
佳能单反相机70D |
|
8 |
六足蜘蛛机器人(2套) |
HoxBot 1+ |
|
9 |
进口机械臂 |
UR5 |
|
10 |
国产机械臂 |
遨博 |
|
11 |
服务器(机器人实验室) |
PCS-HBIS 4U |
|
12 |
工作站(科技楼402) |
联想ThinkStation D30 |
|
13 |
Pioneer 3机器人 |
Pioneer3-AT |
|
14 |
NI信号采集系统 |
NI PXI-1042Q |
|
15 |
7自由度人机共融机械臂(正在采购中) |
库卡LBR iiwa人机共融机械臂 |
具体明细如下所示:(包括功能说明及相关的图片)
1、3D打印机
功能说明:3D打印机,即快速成形技术的一种机器,它是一种数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。过去其常在模具制造、工业设计等领域被用于制造模型,现正逐渐用于一些产品的直接制造,意味着这项技术正在普及。
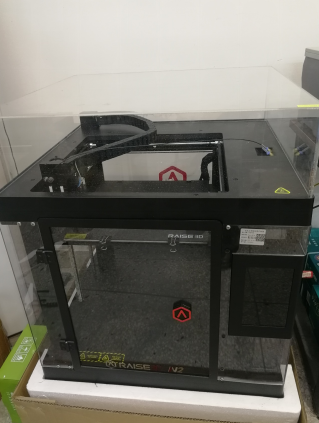
图1 3D打印机
2、交互式虚拟现实系统
功能说明:虚拟现实技术是仿真技术的一个重要方向,是仿真技术与计算机图形学、人机接口技术、多媒体技术、传感技术、网络技术、等多种技术的集合。是一门富有挑战性的交叉技术前沿学科和研究领域。虚拟现实技术(VR)主要包括模拟环境、感知、自然技能和传感设备等方面。模拟环境是由计算机生成的、实时动态的三维立体逼真图像。感知是指理想的VR应该具有一切人所具有的感知。除计算机图形技术所生成的视觉感知外,还有听觉、触觉、力觉、运动等感知,甚至还包括嗅觉和味觉等,也称为多感知。自然技能是指人的头部转动,眼睛、手势、或其他人体行为动作,由计算机来处理与参与者的动作相适应的数据,并对用户的输入作出实时响应,并分别反馈到用户的五官。传感设备是指三维交互设备。
图2 交互式虚拟现实系统
3、机器视觉设备
功能说明:视觉系统就是用机器代替人眼来做测量和判断。视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。是用于生产、装配或包装的有价值的机制。它在检测缺陷和防止缺陷产品被配送到消费者的功能方面具有不可估量的价值。

图3 机器视觉实验箱

图4 旋转式机器视觉实验系统

图5 平移式机器人视觉实验系统

图6 线阵检测实验系统

图7 双目立体视觉实验系统
4、Optitrack光学动作捕捉仪
功能说明:OptiTrack全身动作捕捉系统轻松创建台式应用动作捕捉工作室。"全身基础套装"包含高级光学动作捕捉系统的全部必要组件,即买即用,可对人类的自然全身动作进行准确捕捉。"全身基础套装"由NaturalPoint公司研制,可帮助用户对自己的全身动作进行轻松捕捉,一人即可完成操作。"全身基础套装"与Poser和MotionBuilder软件兼容,对专业人士和业余爱好者都适用。

图8 Optitrack光学动作捕捉仪
5、大疆无人机
功能介绍:不同于以往的无人机,Mavic Pro主打便携,尽管配备有四个悬臂式螺旋桨,但收起时用户仍然可以只用一只手就拿起Mavic Pro。与此前GoPro推出的Karma无人机类似,Mavic Pro也能够拍摄4K分辨率的视频,并配备地标领航系统。不同的是Mavic Pro的续航能力更强,其最长飞行时间为27分钟、飞行距离为7公里。

图9 大疆无人机
6、蛇形机器人
功能介绍:蛇形机器人,是一种能够模仿生物蛇运动的新型仿生机器人。由于它能像生物一蛇形机器人样实现"无肢运动",因而被国际机器人业界称为"最富于现实感的机器人"。日本东京科技大学于1972年研制出世界上第一条蛇形机器人,其速度可达40厘米/秒。而美国的蛇形机器人研究则代表了当今世界的先进水平。2000年10月,美国航空航天局在加利福尼亚装备研制中心展示了一种用于外太空探险的蛇形机器人,它能在一些复杂地形行走时如履平地,运动十分灵活,并具有探测、侦探等多种功能。

图10 蛇形机器人
7、单反相机
功能介绍:70D采用了2020万像素CMOS传感器,搭载全新的全像素双核CMOS AF系统,内置了Wi-Fi功能,连接智能手机后即可遥控实时显示拍摄,并且使用了和650D一样的触控翻转屏(3英寸104万像素),达到印刷级显示效果。

图11 单反相机
8、六足蜘蛛机器人
功能介绍:在自然界和人类社会中存在一些人类无法到达的地方和可能危及人类生命的特殊场合。如行星表面、灾难发生矿井、防灾救援和反恐斗争等,对这些危险环境进行不断地探索和研究,寻求一条解决问题的可行途径成为科学技术发展和人类社会进步的需要。地形不规则和崎岖不平是这些环境的共同特点。
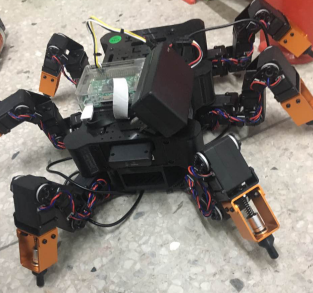
图12 六足蜘蛛机器人
9、UR5机械臂
功能说明:机械臂是高精度,高速点胶机器手。对应小批量生产方式,提高生产效率。除点胶作业之外,可对应uv照射,零件放置,螺丝锁定,电路板切割等各种工作。
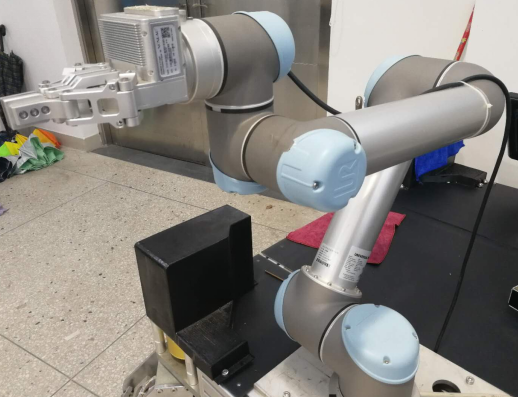
图13 UR5机械臂
10、遨博机械臂
功能介绍:机械臂是高精度,高速点胶机器手。对应小批量生产方式,提高生产效率。除点胶作业之外,可对应uv照射,零件放置,螺丝锁定,电路板切割等各种工作。

图14 遨博机械臂
11、服务器
功能介绍:服务器指一个管理资源并为用户提供服务的计算机,通常分为文件服务器、数据库服务器和应用程序服务器。运行以上软件的计算机或计算机系统也被称为服务器。相对于普通PC来说,服务器在稳定性、安全性、性能等方面都要求更高,因此CPU、芯片组、内存、磁盘系统、网络等硬件和普通PC有所不同。

图15 服务器
12、工作站
功能介绍:由计算机和相应的外部设备以及成套的应用软件包所组成的信息处理系统。它能够完成用户交给的特定任务,是推动计算机普及应用的有效方式。工作站应具备强大的数据处理能力,有直观的便于人机交换信息的用户接口,可以与计算机网相连,在更大的范围内互通信息,共享资源。工作站在编程、计算、文件书写、存档、通信等各方面给专业工作者以综合的帮助。
13、Pioneer 3机器人
功能介绍:ARIA是为MobileRobots开发的,面向对象的,用于机器人控制的应用程序接口系统。该系统基于C++语言,是一个可以简单、方便的用于先锋系列机器人的运动控制以及传感器操作的客户端软件。该软件具有强大的功能和适应性,是机器人高端软件编写的理想选择,包括MobileSim在内的先锋机器人基本软件系统都是以ARIA为基础的。
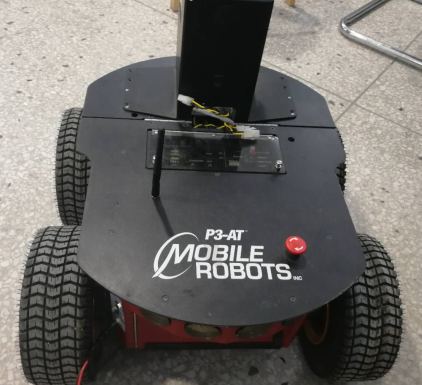
图16 Pioneer 3机器人
14、NI信号采集系统
功能介绍:NI PXI-1042系列机箱可满足各种测试和测量应用的需求。NI PXI-1042系列包括PXI-1042(0-55°C 扩展温度范围)和PXI-1042Q(噪声低至43 dBA)。PXI-1042系列机箱具有最新PXI规范的所有特性,包括内置10 MHz参考时钟、PXI触发总线、星型触发和局部总线。

图17 NI信号采集系统
15、7自由度人机共融机械臂(正在采购中)
功能介绍:LBR iiwa 是第一款量产的灵敏型机器人,也是具有人机协作能力的机器人。LBR 表示“轻型机器人”,iiwa 则表示“intelligent industrial work assistant”,即智能型工业作业助手。由此为灵敏型工业机器人技术开创了新的纪元——前景广阔的新型生产流程。首次实现人类与机器人之间的直接合作,以完成高灵敏度需求的任务。因此形成新的工作区域,可以提高经济效益并且达到最高效率。

图18 7自由度人机共融机械臂 |




